同构遥操作
欢迎使用 R1 Lite Teleop(简称 R1 Lite-T) —— 专为 R1 Lite 打造的同构遥操作平台。
在本教程中,我们将提供详细的说明,一步步陪同您完成开箱,自检和连接等步骤。我们将提供清晰的说明,帮助您快速熟悉新设备并确保一切准备就绪。请跟随步骤操作,确保顺利开启您的机器!
1. 开箱
1.1 开箱前准备
| 物品 | 数量 | 备注 |
|---|---|---|
| 笔记本 | 1 | x86 & Ubuntu 22.04 ROS Humble |
| 网线 | 1 | - |
1.2 物品清�单检查
收到产品时请根据以下货品交付清单检查包装盒内的物品是否齐全。
| 物品 | 数量 |
|---|---|
| R1 Lite Teleop | 1 |
| 电源适配器及接线 | 1 |
| Type-C手柄充电线 | 1 |
| JoyCon手柄 | 1 |
| G夹固定器 | 2 |
| HDMI转MINI HDMI线 | 1 |
| 网线 | 1 |
2. 连接R1 Lite Teleop
2.1 固定 R1 Lite Teleop
使用G夹将R1 Lite Teleop(L)和 R1 Lite Teleop(R)固定至桌面,建议左右设备间距在30cm以内,如下图所示。

2.2 正确摆放设备
注意:
每次启动R1 Lite Teleop之前,请务必将其姿态调整为初始姿态,否则可能存在使用风险。
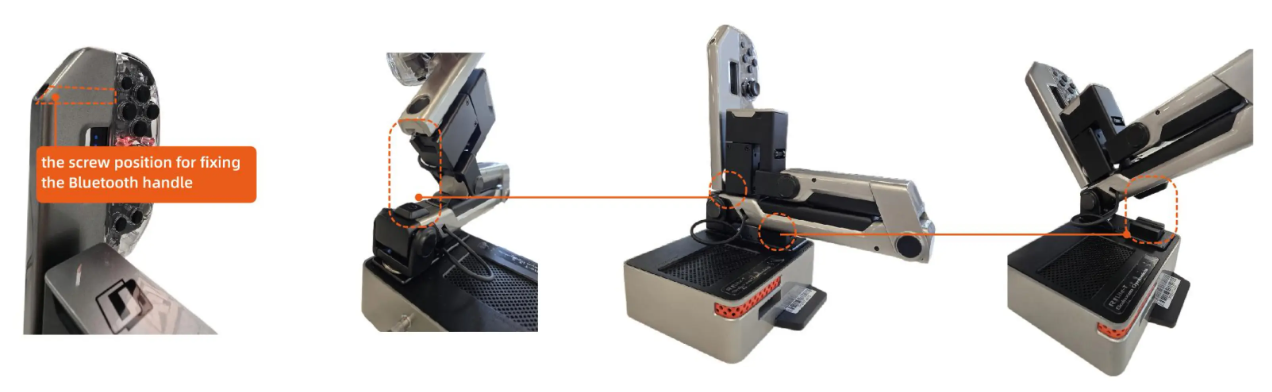
1.安装并固定蓝牙手柄
2.请参考下图,正确摆放R1 Lite Teleop的所有连杆位置,妥善放置在定位槽中。
2.3 连接并启动设备
- 连接 R1 Lite Teleop: 将 R1 Lite Teleop(L) 3芯航插连接至 R1 Lite Teleop(R) 左臂端口。
- 连接 R1 Lite:用网线连�接 R1 Lite Teleop(R) 的网口与 R1 Lite 的网口,确保通信正常。
- 连接电源适配器:将电源适配器连接至 R1 Lite Teleop(R) 的DC插口。
- 开启R1 Lite:将R1 Lite上电并开启。

3. 遥操作流程
请按照以下步骤操作,配置并开始遥操任务。
3.1 多机通信设置
3.1.1 配置网络
请您使用有线方式配置网络,有利于提升多机通信的稳定性。
有线连接:将 R1 Lite中心控制单元CCU与Teleop连接,如图所示。

注意:R1 Lite CCU 的有线IP通常为10.42.0. xxx; R1 Lite Teleop上位机的有线IP通常为10.42.0.1。
3.1.2 修改文件
注意:R1 Lite NUC 与 R1 Lite Teleop 的环境是出厂配置完成的,您可根据步骤进行确认,正确则无需修改。
-
连接R1 Lite NUC 查看环境配置 :
#查看是否输出存放配置文件的路径:/opt/galaxea/find_server/super_client_configuration_file.xml
echo $FASTRTPS_DEFAULT_PROFILES_FILE
#查看本机有线IP
ip a
#查看输出的地址是否是当前有线IP 如:<address>10.42.0.xx</address>
cat /opt/galaxea/find_server/super_client_configuration_file.xml | grep address
#如果不是R1 Lite NUC 的有线IP,请修改为当前有线IP
vim /opt/galaxea/find_server/super_client_configuration_file.xml
#将文件中<address>10.42.0.xx</address>修改为本机器有线IP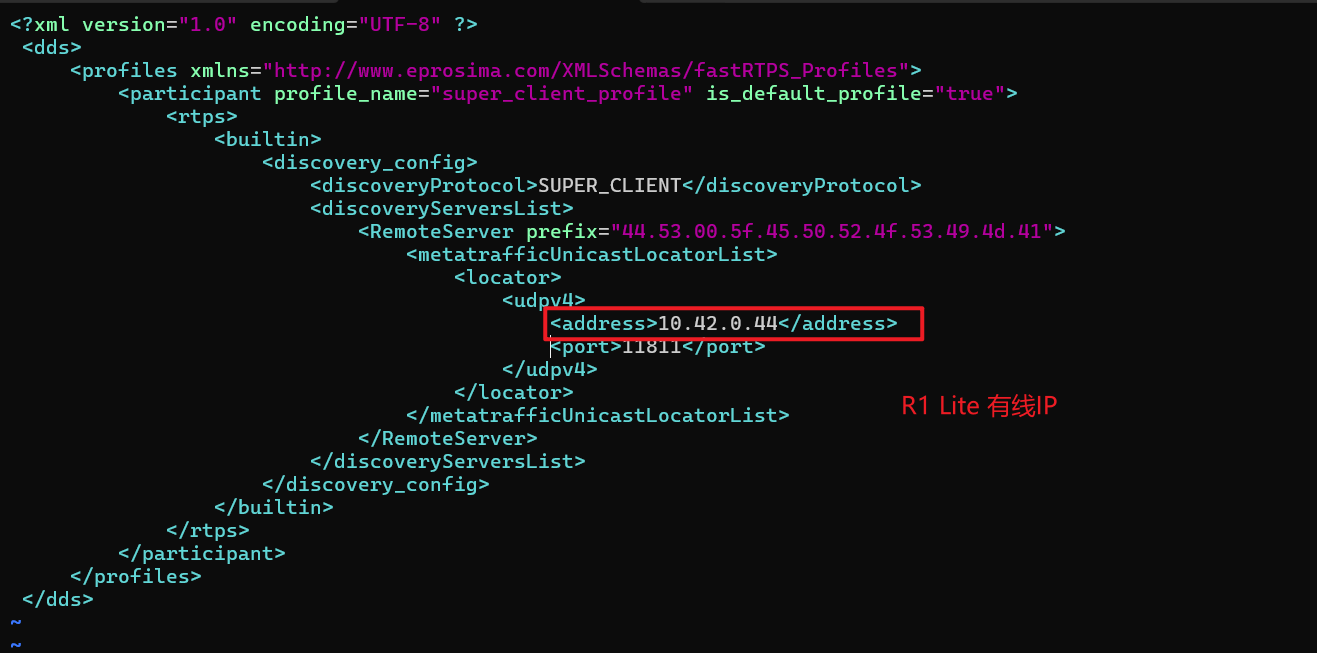
-
确认R1 Lite Teleop 的环境配置: 通过R1 Lite 登陆到R1 Lite Teleop,如果是使用板卡R1 Lite Teleop的用户名
cat,密码为temppwdssh {username}@{R1_Lite_Teleop_IP} #R1 Lite Teleop有线IP通常为10.42.0.1#查看是否输出存放配置文件的路径:/home/cat/galaxea/find_server/super_client_configuration_file.xml
echo $FASTRTPS_DEFAULT_PROFILES_FILE
#查看输出的地址是否是 R1 Lite NUC 的有线IP
cat ~/galaxea/find_server/super_client_configuration_file.xml | grep address
#如果不是R1 Lite CCU 的有线IP,请修改为 R1 Lite NUC IP
vim ~/galaxea/find_server/super_client_configuration_file.xml
#将<address>10.42.0.xx</address>修改为R1 Lite CCU有线IP以上文件修改之后需重启确保生效
-
示例:R1 Lite 和 R1 Lite Teleop 通过网线连接,R1 Lite 的有线IP为
10.42.0.44。

3.2 开启遥操
3.2.1 启动 R1 Lite
使用以下命令启动 R1 Lite 所有节点:
#进入存放脚本的目录之后执行脚本
cd ~{your_download_path}/install/startup_config/share/startup_config/script/
./robot_startup.sh boot ../sessions.d/ATCStandard/R1LITEBody.d/
3.2.2 启动 R1 Lite Teleop
注意:请您确认 R1 Lite Teleop 的连杆已摆放至零点位置。
-
连接蓝牙手柄。
a. 短按蓝牙手柄开机键,成功开启后,您可观测到蓝色流水灯。
b. 连接成功后,手柄内侧蓝色流水灯效果消失,转为蓝灯常亮。

-
节点启动。
a.请确认 R1 Lite 与 R1 Lite Teleop 已通过网线连接。
b.当R1 Lite Teleop 上电开启之后,状态指示灯为黄色长亮。
c.当检测到R1 Lite 执行启动节点之后,R1 Lite Teleop会自动拉起自身服务。
d.当指示灯为绿色长亮后说明 R1 LITE Teleop 与 R1 LITE 开始建立连接,等待3-5s可进行对 R1 Lite 的全身遥操作。
3.2.3 R1 LITE Teleop 灯效说明
| 状态 | LED颜色 |
|---|---|
| 初始状态与断联(超过3s未收到R1 Lite消息) | 黄灯 |
| R1 Lite 与 R1 Lite Teleop建立连接 | 绿灯 |
| 数据采集开始后 | 蓝灯 |

3.2.4 手柄按键说明
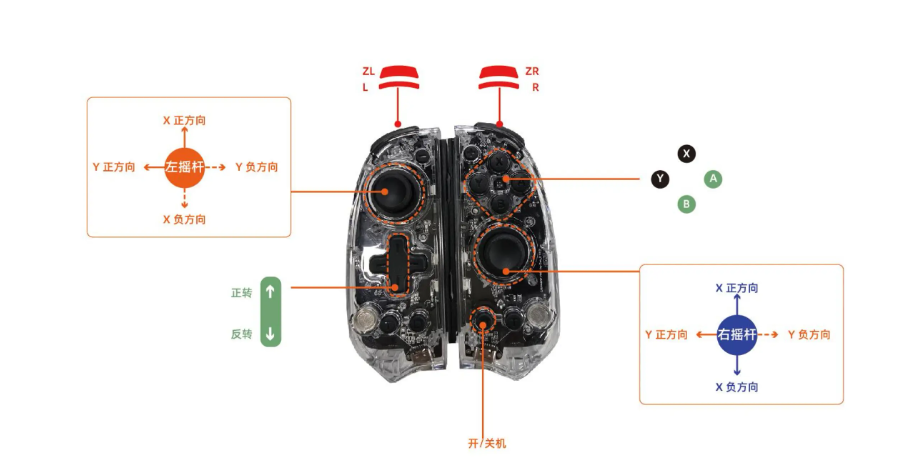
| 摇杆/按键 | 左手柄 | 右手柄 |
|---|---|---|
| 摇杆X 正方向 | 底盘向前移动(Vx 为正) | 躯干向上移动(Vz 为正) |
| 摇杆X 负方向 | 底盘向后移动(Vx 为负) | 躯干向下移动(Vz 为负) |
| 摇杆Y 正方向 | 底盘向��左平移(Vy 为正) | 底盘逆时针自旋(Vw 为正) |
| 摇杆Y 负方向 | 底盘向右平移(Vy 为负) | 底盘顺时针自旋(Vw 为负) |
| 按键 ↑ | 躯干Pitch角正转 | - |
| 按键 ↓ | 躯干Pitch角反转 | - |
| 按键 A | - | 躯干向前移动(Vx为正) |
| 按键 B | - | 躯干向后移动(Vx为负) |
| 按键 X | - | 开启录制:按一次开始录制数据 删除数据:间隔5秒后再按一次删除数据 |
| 按键 Y | - | 停止录制数据 |
| 按键 ZL | 左夹爪闭合 | - |
| 按键 L | 左夹爪张开 | - |
| 按键 ZR | 右夹爪闭合 | - |
| 按键 R | 右夹爪张开 | - |
| 按键 Home | 右夹爪张开 | - |
4. 数据落盘说明
请按照以下步骤操作,了解并配置数据采集。
4.1 数据格式介绍
数据采集的文件格式为mcap ,文件后缀为 *.mcap 。
4.2 数据获取
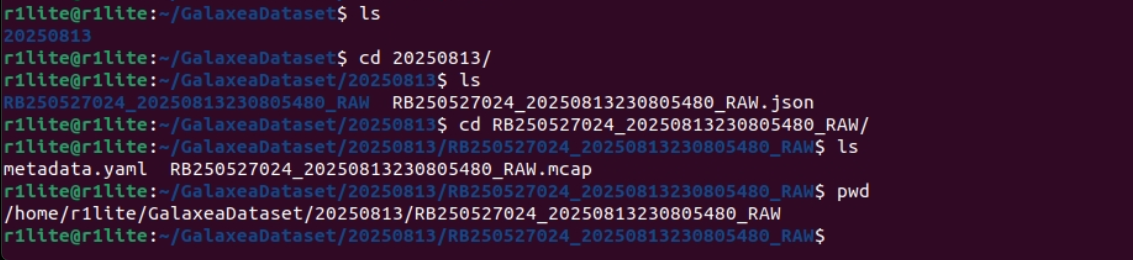
默认存储路径为:/home/r1lite/GalaxeaDataset/{date}/
date 为当天的日期,格式参考如下:20250923
4.3 配置文件介绍
4.3.1 配置文件的默认存储路径
默认数据录制使用的配置文件位于:
/opt/galaxea/data_collection/data_task_config.json
4.3.2 配置文件说明
配置文件用于描述此次采集任务的信息,您可以根据需求自行修改。
{
"project_info": {
"project_name": "test"},
"task_info": {
"task_name": "test_data_collection",
"task_owner": "galaxea" }
"operation_info": {
"teleoperation_type": "teleop",
"location": "suzhou",
"operator_name": "galaxea"}
}
4.4 数据落盘文件介绍
数据以 mcap + json 格式保存,文件一一对应。例如:
# 例如以下两个文件代表了一个数据包
S2R12000P18245_20240213173320125_RAW.mcap
S2R12000P18245_20240213173320125_RAW.json
# 格式为 robot_serial_number+timestamp+RAW
# robot_serial_number:机器人序列号,位于 /opt/galaxea/body/RSN
# timestamp:数据采集的时间戳精确到毫秒。
# RAW:代表数据采集原始落盘数据
保存位置示例: