传感器标定数据采集方法
数据采集流程
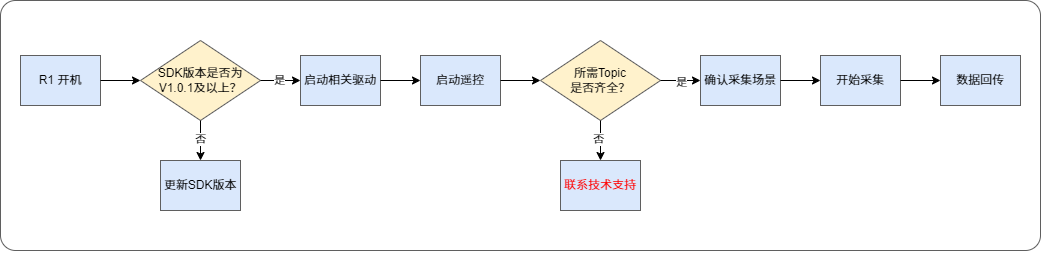
1. 开机
启动R1
2. 确认SDK版本
请确认R1整机SDK版本为V1.0.1及以上。
点击这里获取系统版本更新安装包。
3. 启动相关驱动
Step 1: 清理已有ROS节点
# The following commands will terminate all TMUX.
sudo tmux kill-server
tmux kill-server
pkill -9 ros
Step 2: 启动CAN驱动
sudo ip link set dev can0 type can bitrate 1000000 dbitrate 5000000 fd on
# If "RTNETLINK answers: Device or resource busy" appears, it indicates that the CAN transceiver has been configured and is currently running.
sudo ip link set up can0
Step 3: 启动TMUX
tmux
Step 4: 启动roscore
roscore
Step 5: Ctrl + B +C 开启新的terminal窗口。 启动HDAS
source ~/work/galaxea/install/setup.bash
roslaunch HDAS hdas.launch
Step 6: Ctrl + B +C 开启新的terminal窗口。 启动Chassis Control
source ~/work/galaxea/install/setup.bash
roslaunch mobiman r1_chassis_control.launch
Step 7: Ctrl + B +C 开启新的terminal窗口。 启动Lidar驱动
source ~/work/galaxea/install/setup.bash
roslaunch livox_ros_driver2 msg_MID360.launch
Step 8: Ctrl + B +C 开启新的terminal窗口。 启动Camera驱动
source ~/work/galaxea/install/setup.bash
sudo chmod 777 /dev/ttyTHS1
roslaunch signal_camera signal_camera.launch
4. 开启遥控
重要提示:在进行任何操作之前,请确认所有拨杆开关(SWA/SWB/SWC/SWD)都拨至最上方档位,这样能使R1处于停止状态,防止其意外运行。
在不同功能下,各拨杆开关切换到不同位置的操作说明如下:
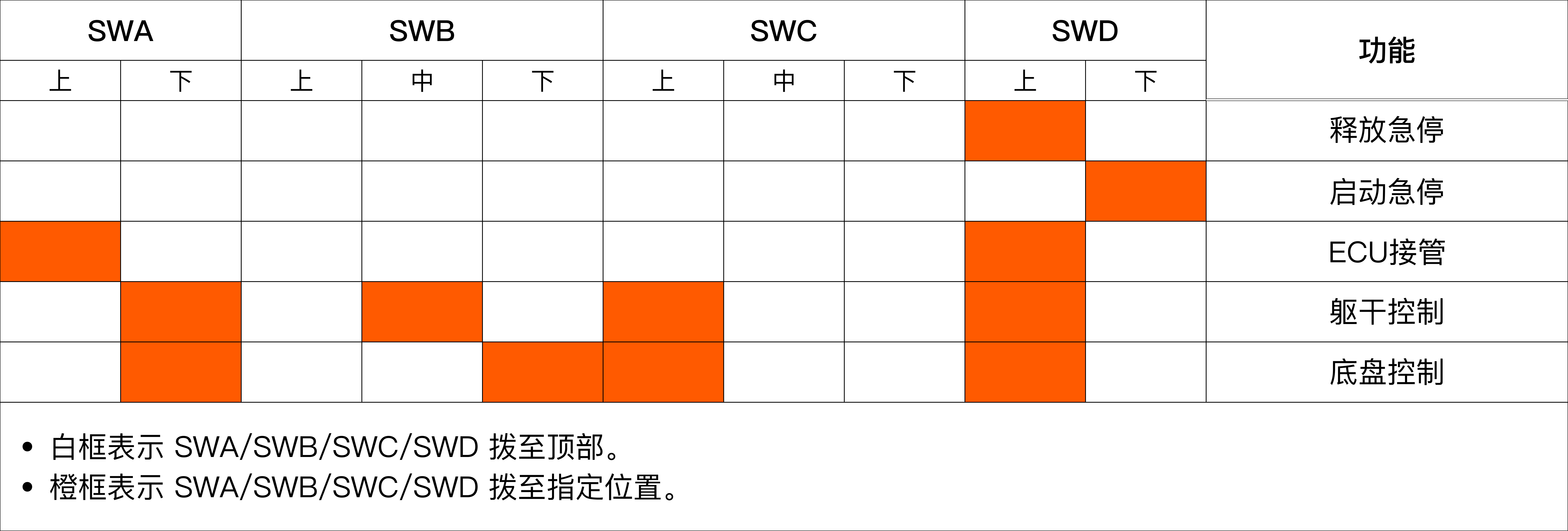
在使用遥控器控制R1之前,请必须先启动 CAN 驱动程序和其他相关程序,详细说明请参考《开机指南》中的 **第4.3, 4.4, 4.5 和其他相关章节。 完成启动后,可将每个开关移至指定位置,并按照以下步骤控制R1。
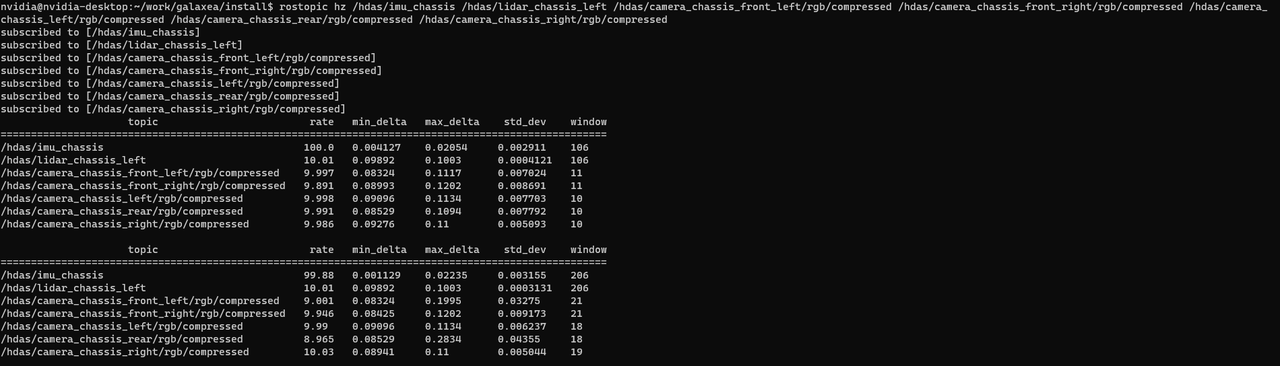
5. 确认Topic
开始采集前, 确保有以下topic,且类型和帧率正常。
rostopic hz /hdas/imu_chassis /hdas/lidar_chassis_left /hdas/camera_chassis_front_left/rgb/compressed /hdas/camera_chassis_front_right/rgb/compressed /hdas/camera_chassis_left/rgb/compressed /hdas/camera_chassis_rear/rgb/compressed /hdas/camera_chassis_right/rgb/compressed
| 传感器 | Topics | 消息类型 | 帧率 |
|---|---|---|---|
| Lidar | /hdas/lidar_chassis_left | sensor_msgs/PointCloud2 | 10 Hz |
| Camera | /hdas/camera_chassis_front_left/rgb/compressed /hdas/camera_chassis_front_right/rgb/compressed /hdas/camera_chassis_left/rgb/compressed /hdas/camera_chassis_rear/rgb/compressed /hdas/camera_chassis_right/rgb/compressed |
sensor_msgs/CompressedImage | 10 Hz |
| wheel | /hdas/feedback_chassis | sensor_msgs/JointState | 200 Hz |
| imu | /hdas/imu_chassis | sensor_msgs/Imu | 100 Hz |
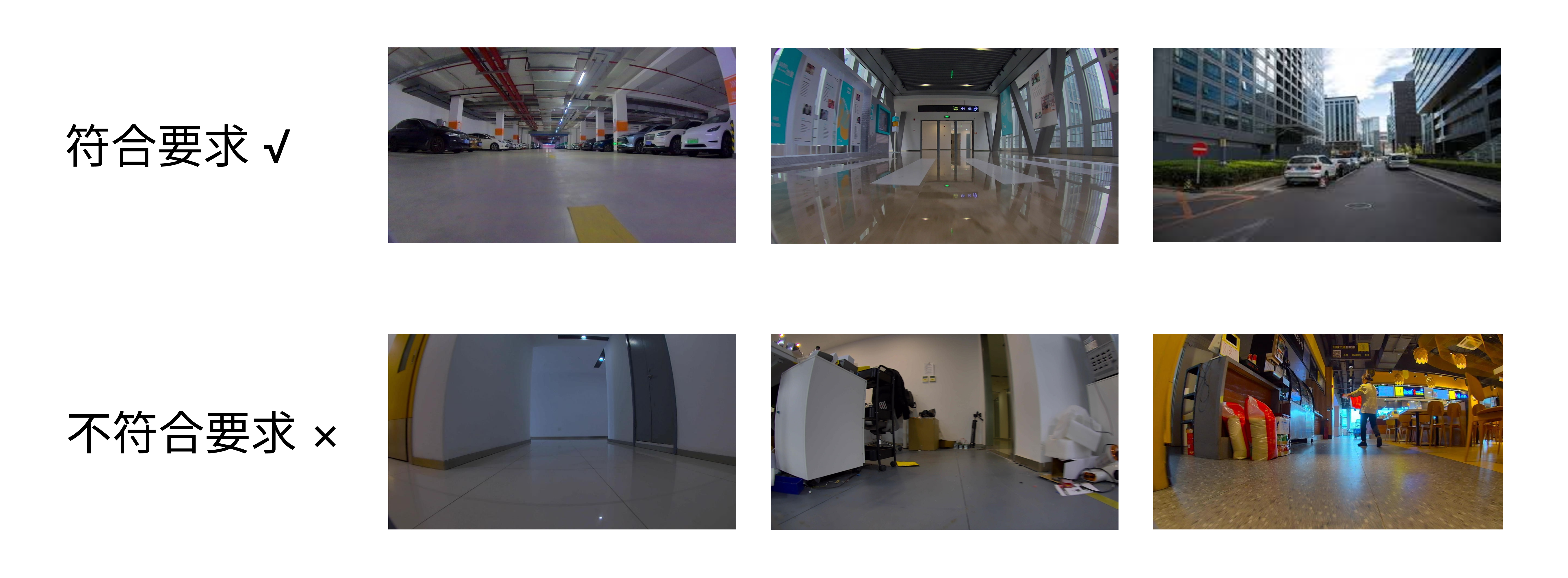
6. 采集场景
符合要求的采集场景示例:光线好、空间开阔超100平米、纹理与结构多样且无动态物体,如照明充足的地下车库、人少开阔的写字楼园区。
不符合要求的采集场景示例:空间狭窄、纹理结构单一、光线不佳或有较多动态物体,像狭窄走廊、大白墙环境、人多的餐厅、办公室等。
7. 采集路线
在对R1传感器进行标定工作时,一共需要采集2组数据,可通过录制ros bag的方式来完成相应数据的收集操作。
rosbag record -a
-
8字行驶
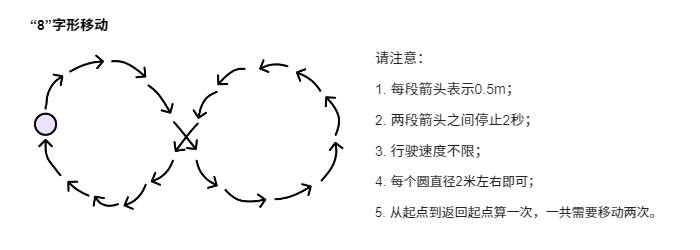
-
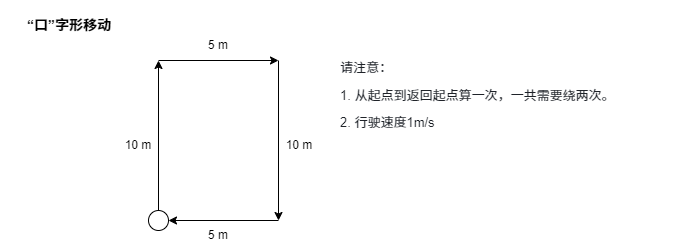
口字型行驶
8. 数据回传
将bag回传。