ROS2发现服务启动指南
ROS2 发现服务随SDK启动
1. 准备工作
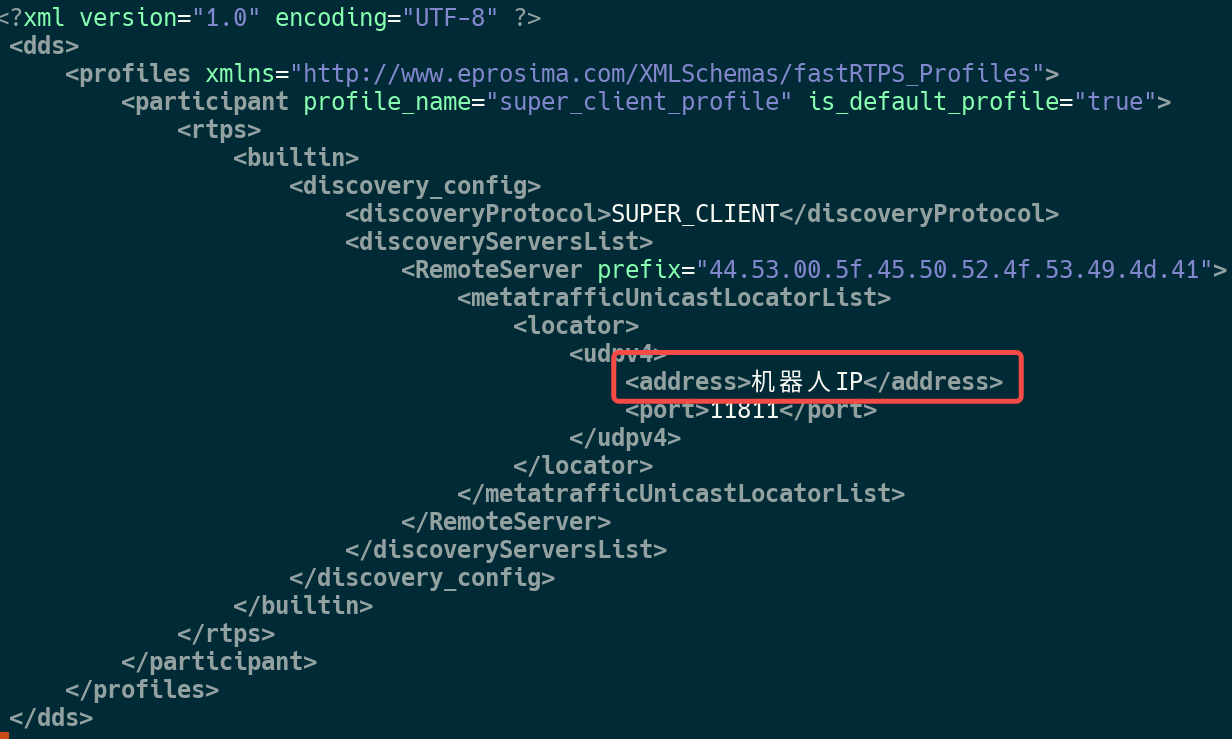
准备配置文件:super_client_configuration_file.xml,点击前往下载。
修改其中的<address>标签值如下:
2. 注释旧服务发现配置(如有)
在运行SDK的机器人的.bashrc里找到如下环境变量并注释掉:
#export FASTRTPS_DEFAULT_PROFILES_FILE=……
#echo export RMW_FASTRTPS_USE_QOS_FROM_XML=1
#export ROS_DOMAIN_ID=……
#export LOCAL_HOST_ONLY=……
重启终端或者重新SSH连接
3. 运行SDK功能包
-
在机器人上新建终端。
-
将准备好
super_client_configuration_file.xml配置文件拷贝到自定义路径,在运行SDK的机器人上建议拷贝到$HOME下。 -
配置发现服务的客户端文件环境变量(在机器人上),添加到
~/.bashrc中并 source:export FASTRTPS_DEFAULT_PROFILES_FILE=<自定义配置存放路径>/super_client_configuration_file.xml -
执行SDK启动命令:
注意:body功能包内不包含发现服务。
./robot_startup.sh boot ../session.d/***
4. 其他多机通信设备配置发现服务的客户端
如在工作电脑上连接机器人,和 ROS2 SDK 通信,需要对工作电脑做如下操作:
- 注释
~/.bashrc中如下环境变量(如有)#export FASTRTPS_DEFAULT_PROFILES_FILE=/home/nvidia/vr_workspace/install/startup_config/share/startup_config/script/prestart/fastrtps_profiles.xml
#echo export RMW_FASTRTPS_USE_QOS_FROM_XML=1
#export ROS_DOMAIN_ID=XX
#export LOCAL_HOST_ONLY=X - 将准备好的
super_client_configuration_file.xml配置文件拷贝到自定义路径,然后配置发现服务的客户端文件环境变量,加到~/.bashrc中并source:export FASTRTPS_DEFAULT_PROFILES_FILE=<自定义配置存放路径>/super_client_configuration_file.xml - 通过 ros2 topic list 测试是否可以查看到 SDK 的 Topic(可能需要执行两次才能看到)。如果无法看到Topic,需要执行:
ros2 daemon stop
ros2 daemon start