About A1Z
Open Source Projects
Follow the Galaxea GitHub open-source community:
- A1Z: https://github.com/userguide-galaxea/GALAXEA-A1Z
- A1Z-T: https://github.com/userguide-galaxea/OpenA1Z-T
License
-
Open-source license: This project is released under the MIT License. Copyright belongs to Galaxea.
-
Third-party dependency licenses:
Dependency License Description numpy BSD-3-Clause Numerical computing python-can LGPL-3.0 CAN bus communication pinocchio (pin) BSD-2-Clause Robot dynamics computation
Safety Guidelines
The Galaxea robotic arm may create safety risks if it is operated incorrectly.
- Before using the robotic arm, read the following safety instructions carefully.
- Personnel who are not familiar with these safety guidelines must be strictly supervised when approaching the robot and must be clearly informed of the potential risks of robot operation.
- Before using this product, thoroughly inspect the surrounding environment to eliminate any potential safety hazards.
Technical Specifications
 A1Z robotic arm
A1Z robotic arm
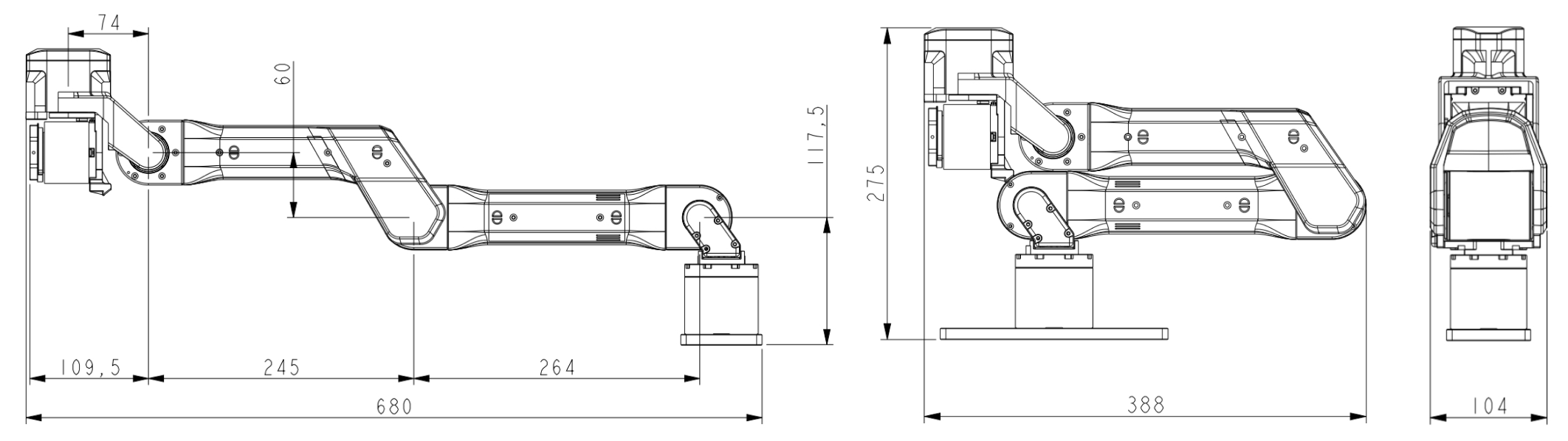
| Mechanical Parameter | A1Z Value |
|---|---|
| Dimensions | 600L x 100W x 305H mm |
| Weight | 4.2 kg |
| Rated Voltage | 24V |
| Current | 15A |
| Communication Interface | CAN |
| Performance Parameter | A1Z Value |
|---|---|
| Degrees of Freedom | 6 |
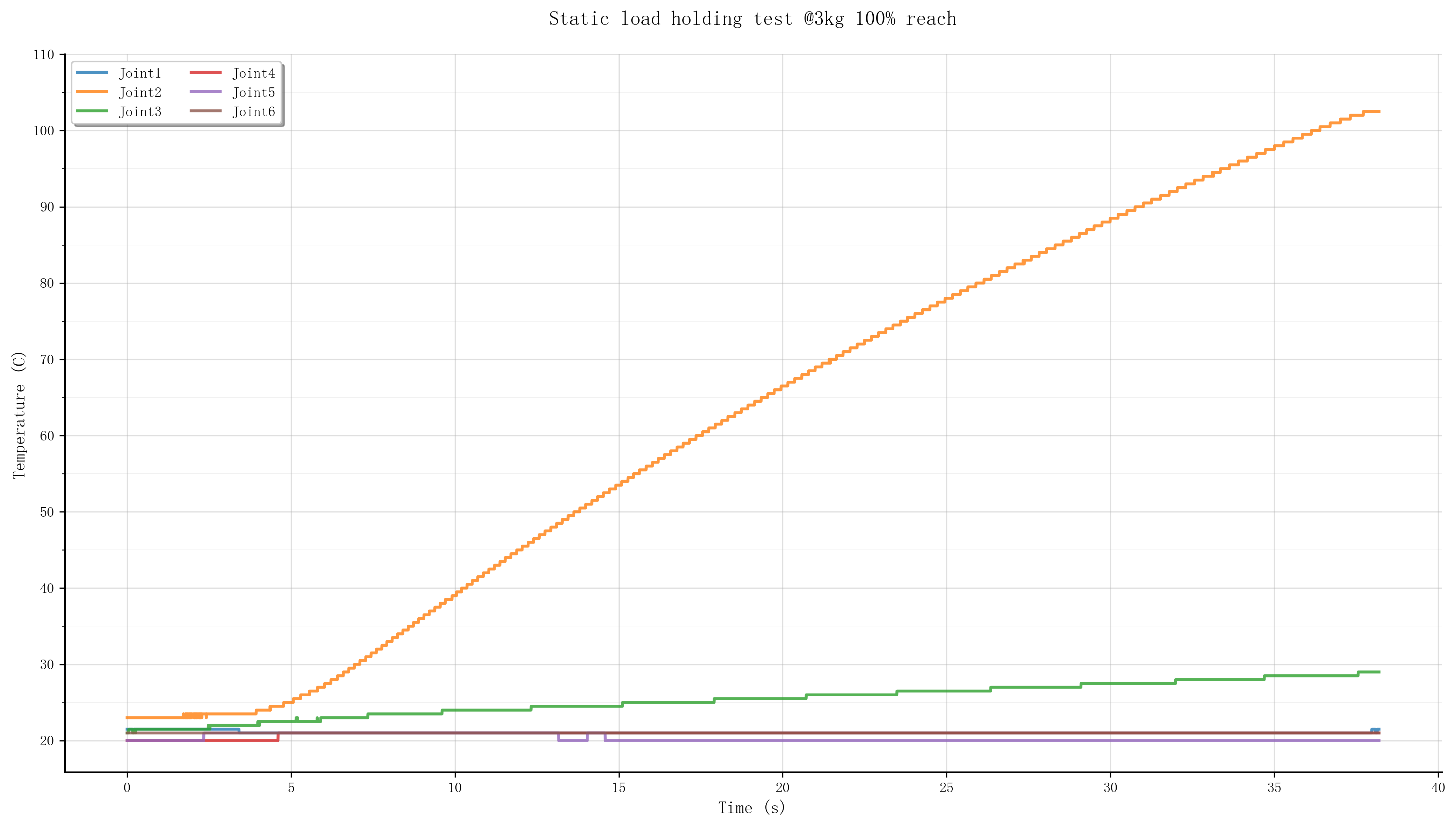
| Rated Payload | 3kg |
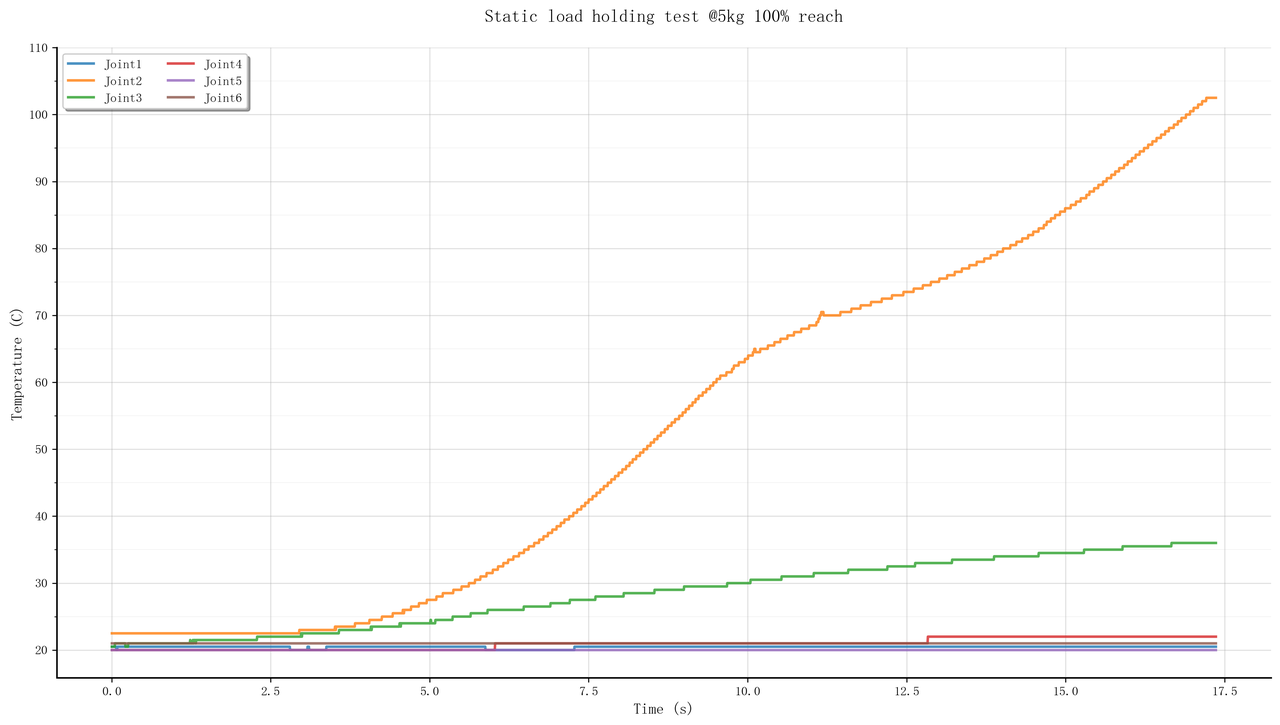
| Peak Payload | 5kg |
| Reach | R:90-626.5 mm, H:722 mm |
| Maximum End-Effector Linear Velocity | 7 m/s |
| Maximum End-Effector Acceleration | 22 m/s² |
| Repeatability | ±0.1 mm |
Mechanical Joints
The A1Z robotic arm has six joints. Each joint supports a rotation range of 240 degrees.
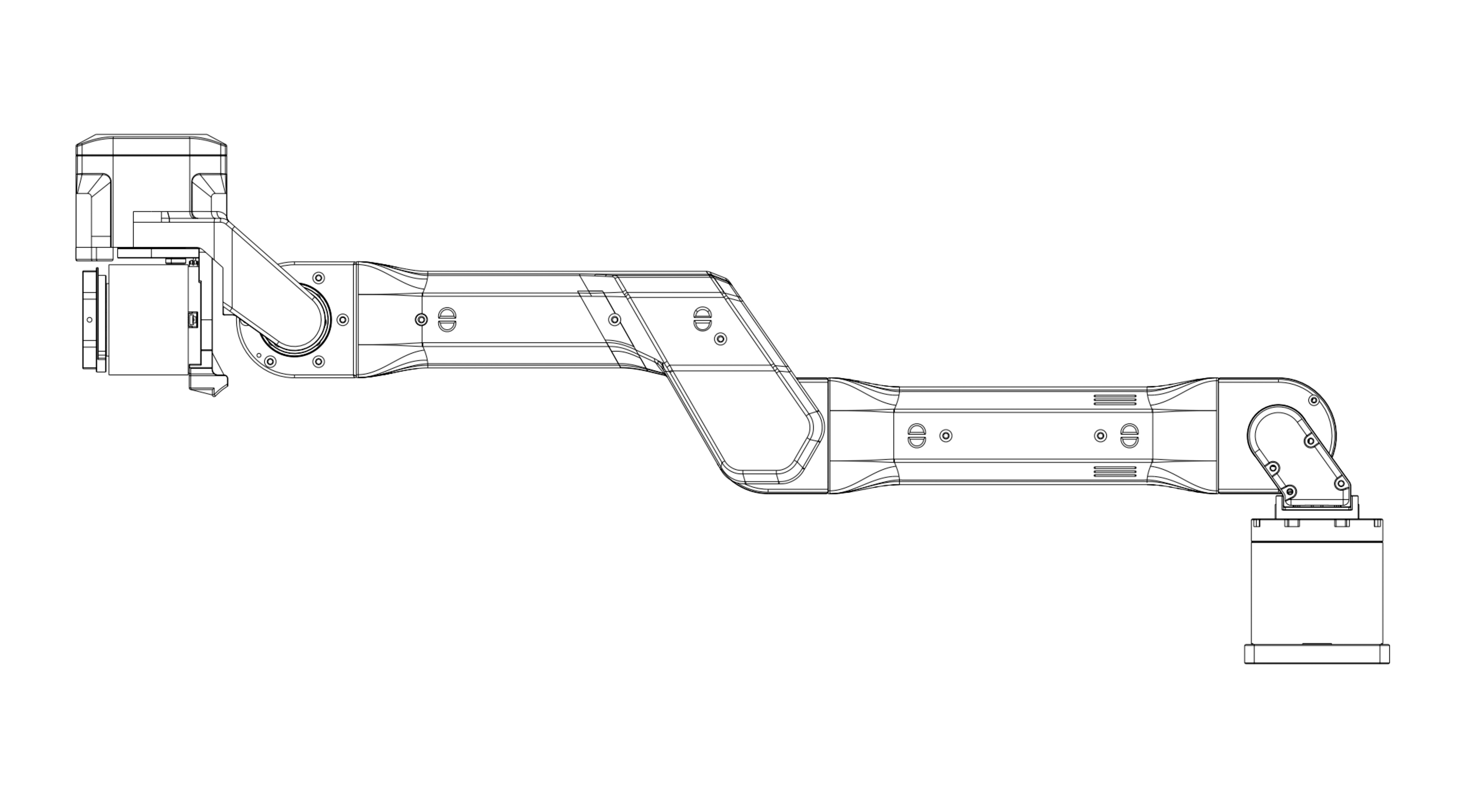
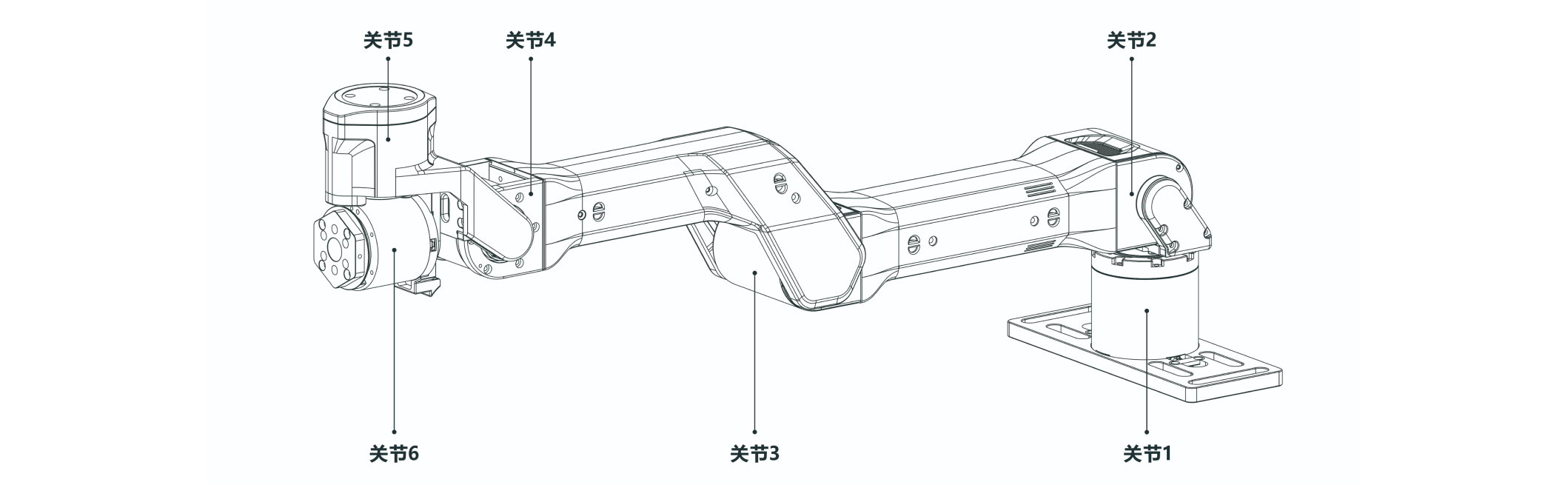 A1Z robotic arm joint structure
A1Z robotic arm joint structure
| Joint | Rated Torque (Nm) | Peak Torque (Nm) | Rated Speed (rpm) | Peak Speed (rpm) | Motion Range (Software Control) | Motion Range (Hardware Limit Protection) |
|---|---|---|---|---|---|---|
| Joint J1 | 20 | 50 | 54 | 60 | [-120°, 120°] | [-130°, 130°] |
| Joint J2 | 25 | 50 | 54 | 60 | [0°, 180°] | [0°, 202°] |
| Joint J3 | 20 | 50 | 54 | 60 | [-180°, 0°] | [-200.38°, 0°] |
| Joint J4 | 9 | 25 | 36 | 52 | [-85°, 85°] | [-91.88°, 110.38°] |
| Joint J5 | 3.5 | 7 | 100 | 150 | [-85°, 85°] | [-90°, 90°] |
| Joint J6 | 3.5 | 7 | 100 | 150 | [-115°, 115°] | [-120°, 120°] |
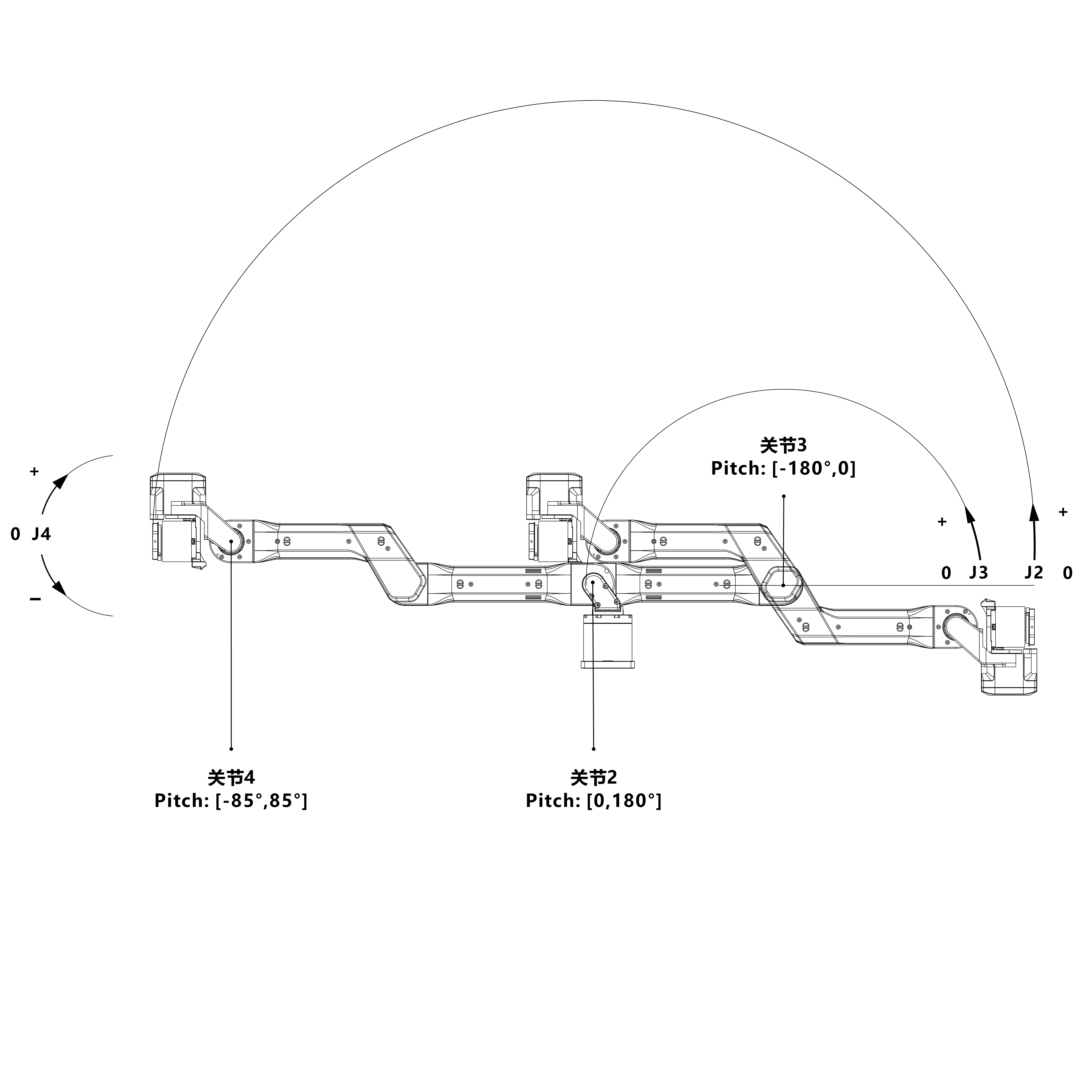
Joint Motion Range
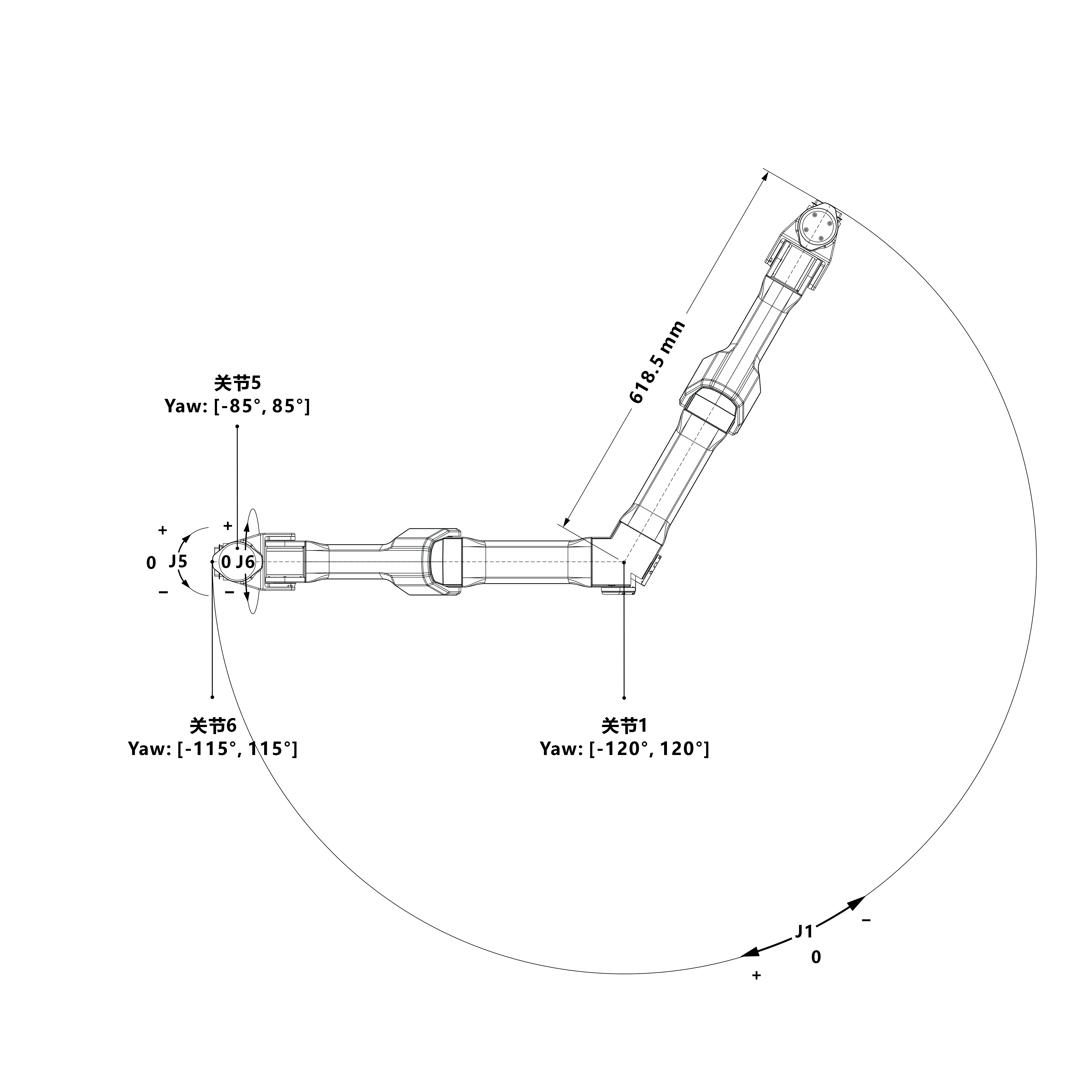
- Joint J1: maximum rotation in the yaw direction is 240 degrees, with a rotation radius of 618.5 mm.
- Joint J2 and Joint J3: maximum rotation in the positive pitch direction is 180 degrees.
- Joint J4: maximum rotation in the pitch direction is 170 degrees.
- Joint J5: maximum rotation in the yaw direction is 170 degrees.
- Joint J6: maximum rotation in the roll direction is 230 degrees.
View the A1Z joint limit parameters.
Connectors
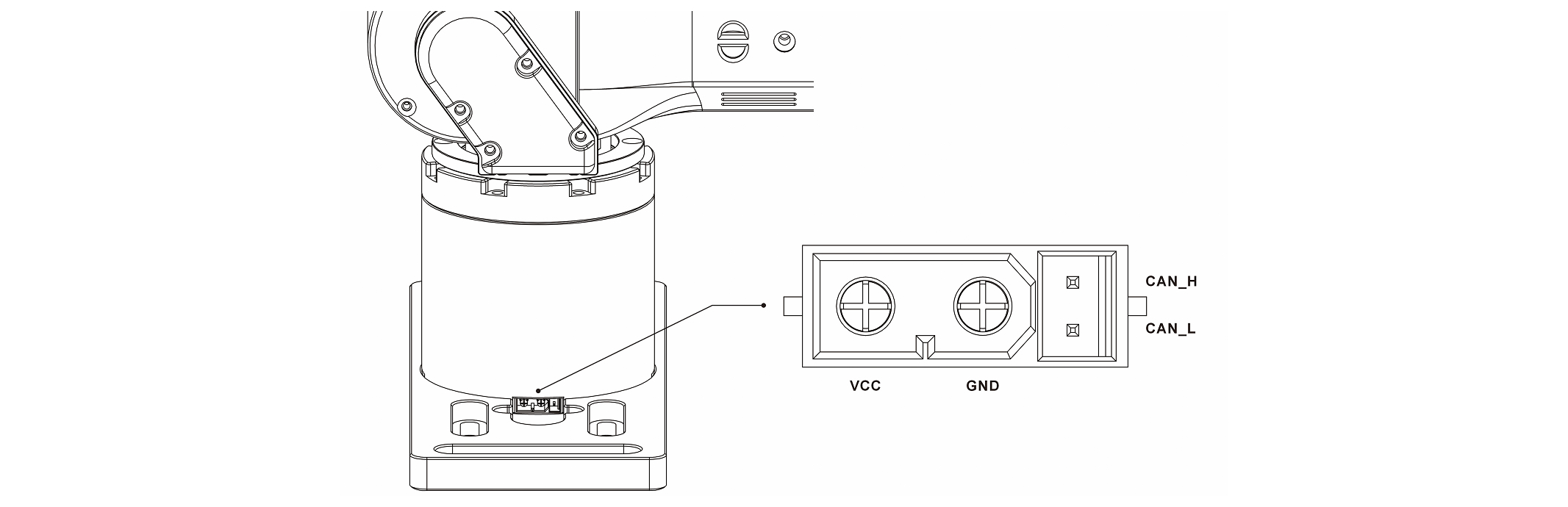 A1Z base connector diagram
A1Z base connector diagram
End Effector
Galaxea G1Z Gripper
Galaxea G1Z is an in-house parallel gripper equipped with one joint motor and a two-finger gripper.
<span style={{ color: 'blue' }}>Note: The A1Z robotic arm does not include a gripper by default. The following section describes the standard G1Z gripper. For purchase inquiries or customized fingertip requirements, please contact us.
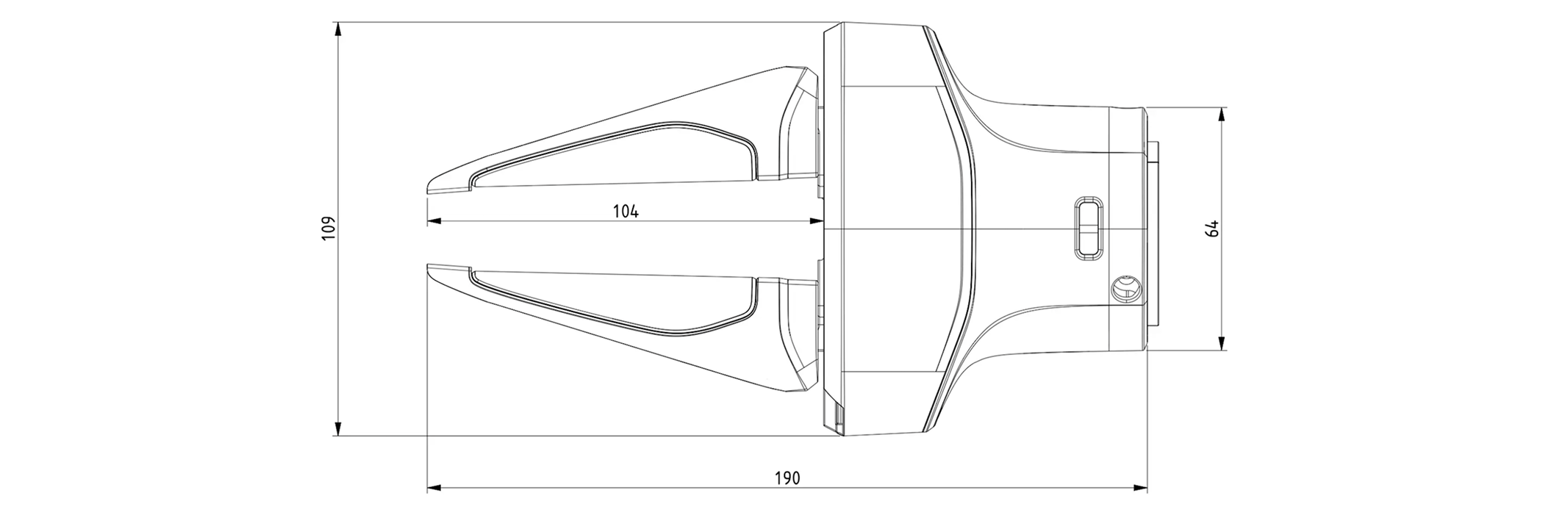 G1Z gripper
G1Z gripper
| Gripper | Parameter |
|---|---|
| Length | 190 mm |
| Gripper Depth | 104 mm |
| Motor Width | 109 mm |
| Gripper Operating Range | 0 ~ 104 mm |
| Rated Gripping Force | 150 N |
| Maximum Opening/Closing Speed | 45 mm/s |
Installation
Follow the steps below to install the G1Z gripper onto the end of the robotic arm. Reverse the steps to remove the gripper.
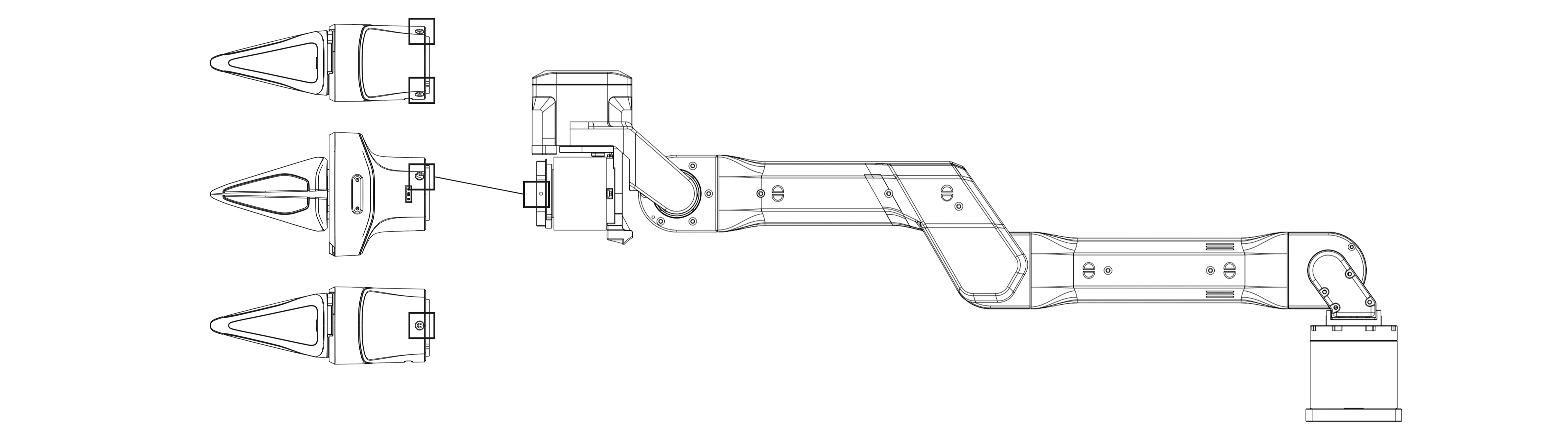 G1Z installation diagram
G1Z installation diagram
- Alignment check: Ensure that the three mounting holes around the gripper align with the three mounting holes at the end of the robotic arm, with the camera mounting holes facing upward.
- Screw fastening: After alignment, use the three supplied screws to fasten the gripper securely to the end of the robotic arm.
- Stability check: After tightening the screws, check again that the gripper is aligned and firmly installed.
- Cable connection: Connect the CAN cable on the outside of J6 at the arm end to the gripper communication port.