关于 A1Z
开源项目
关注星海图GitHub开源社区:
- A1Z: https://github.com/userguide-galaxea/GALAXEA-A1Z
- A1Z-T: https://github.com/userguide-galaxea/OpenA1Z-T
许可
-
开源许可:本项目基于 MIT License 开源,版权归 星海图 所有。
-
第三方依赖许可:
依赖 许可证 说明 numpy BSD-3-Clause 数值计算 python-can LGPL-3.0 CAN 总线通信 pinocchio (pin) BSD-2-Clause 机器人动力学计算
安全指南
Galaxea 机械臂在操作不当的情况下可能带来安全隐患。
- 在您开始使用机械臂之前,请务必详细阅读以下安全须知。
- 对于尚未熟悉本安全指南的人员,在靠近机器人时必须受到严格监督,并需被明确告知机器人操作可能存在的风险。
- 在使用本产品之前,请务必对周围环境进行全面检查,以排除任何潜在的安全威胁。
技术规格
 A1Z机械臂
A1Z机械臂
| 机械参数 | A1Z 参数值 |
|---|---|
| 尺寸 | 600L x 100W x 305H mm |
| 重量 | 4.2 kg |
| 额定电压 | 24V |
| 电流 | 15A |
| 通信接口 | CAN |
| 性能参数 | A1Z 参数值 |
|---|---|
| 自由度 | 6 |
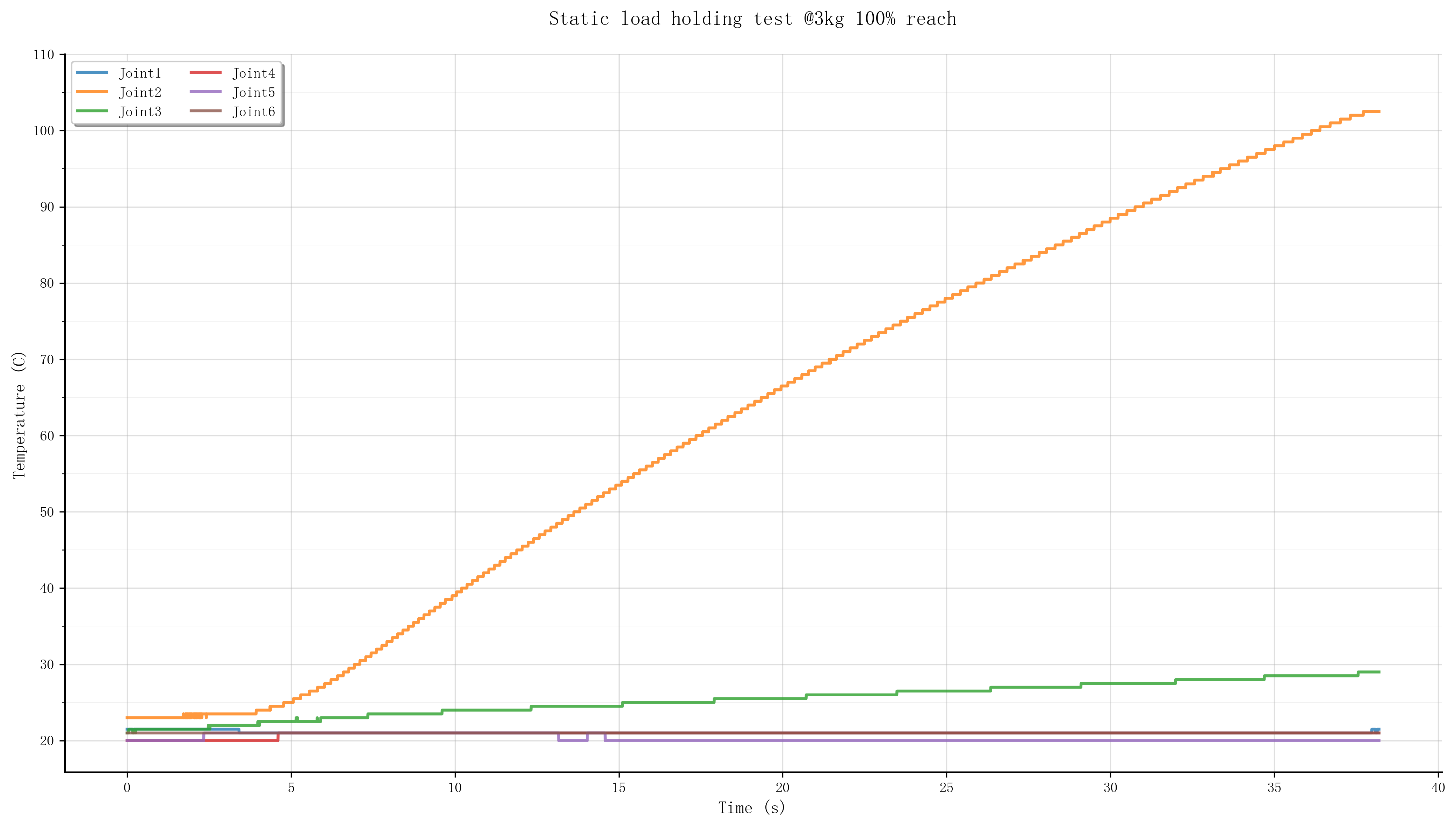
| 额定负载 | 3kg |
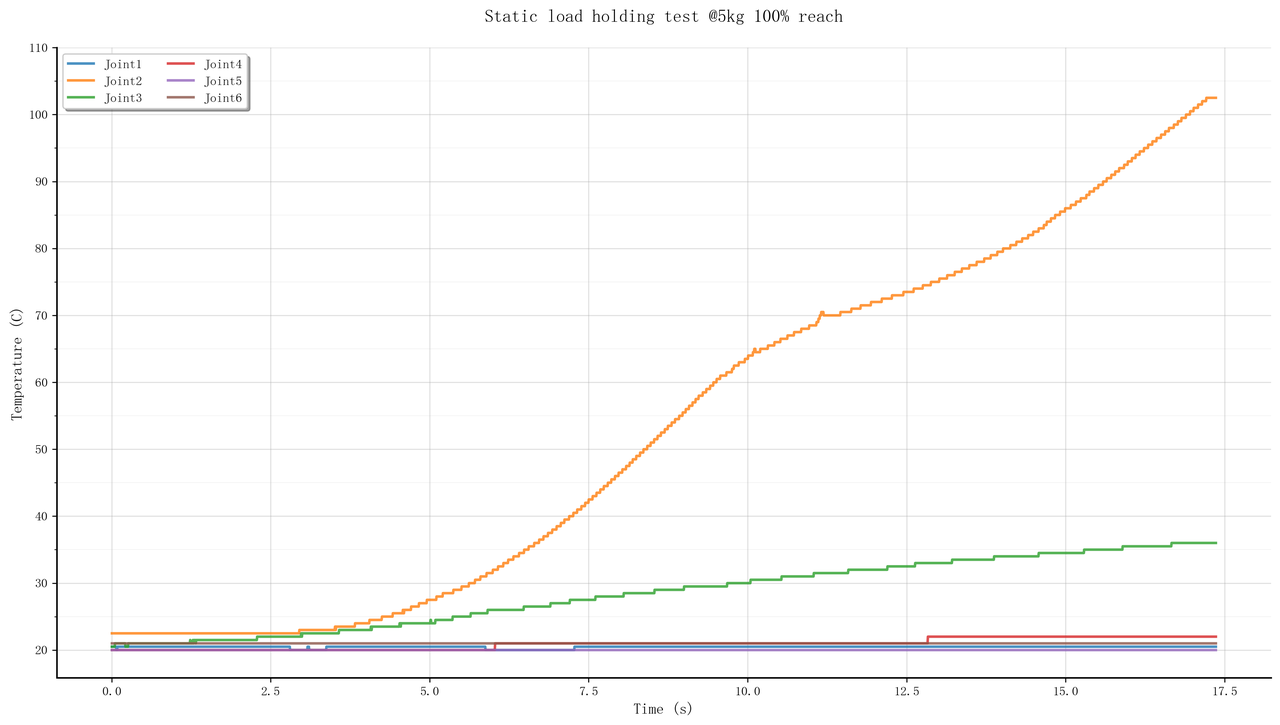
| 峰值负载 | 5kg |
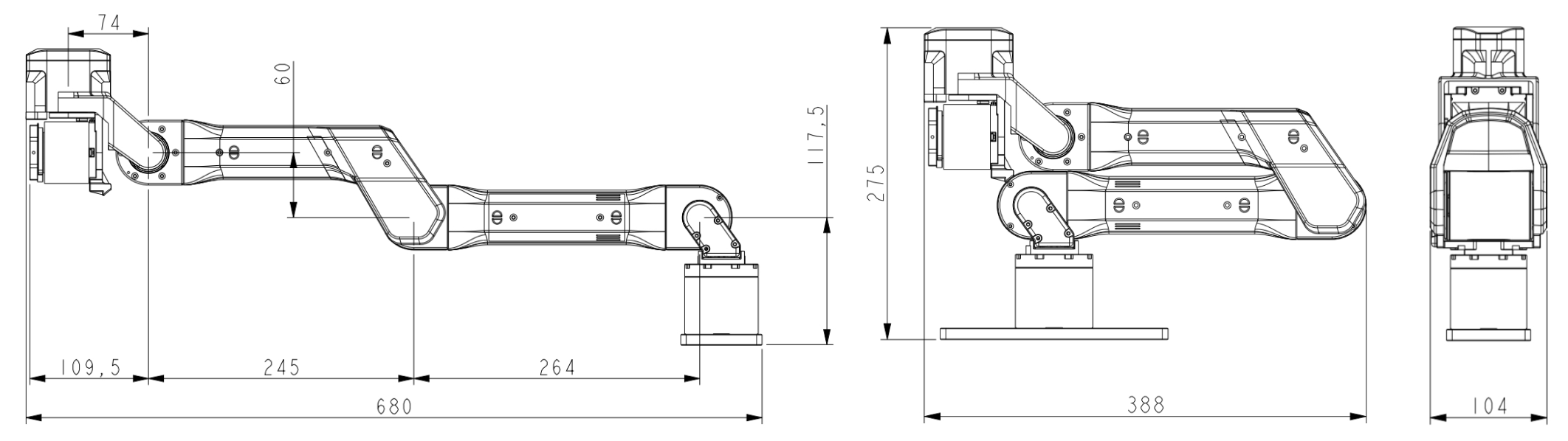
| 臂展 | R:90-626.5 mm,H:722 mm |
| 最大末端线速度 | 7 m/s |
| 最大末端加速度 | 22 m/s² |
| 重复定位精度 | ±0.1 mm |
机械关节
A1Z机械臂的关节共有6个,每个关节的旋转角度为240度。
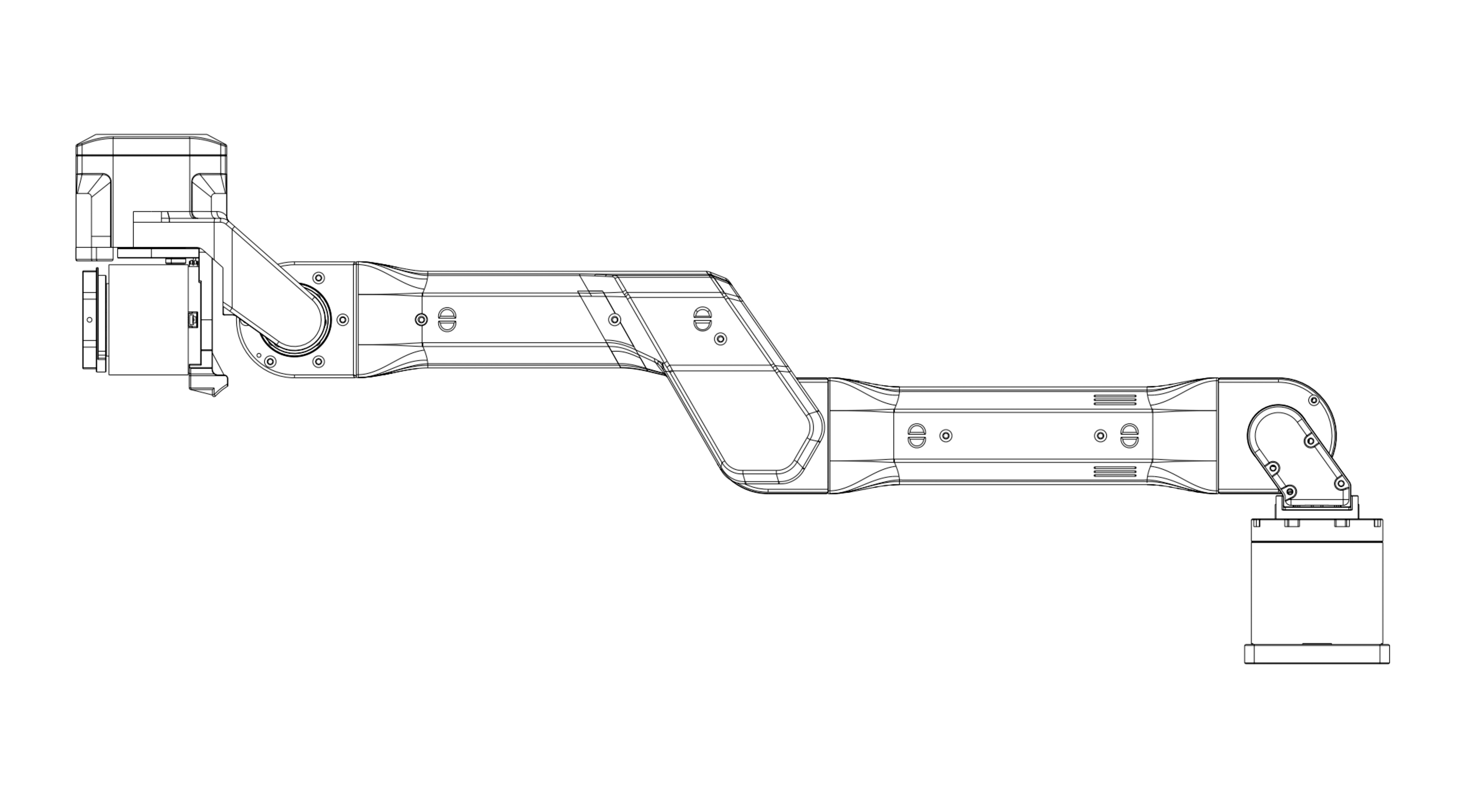
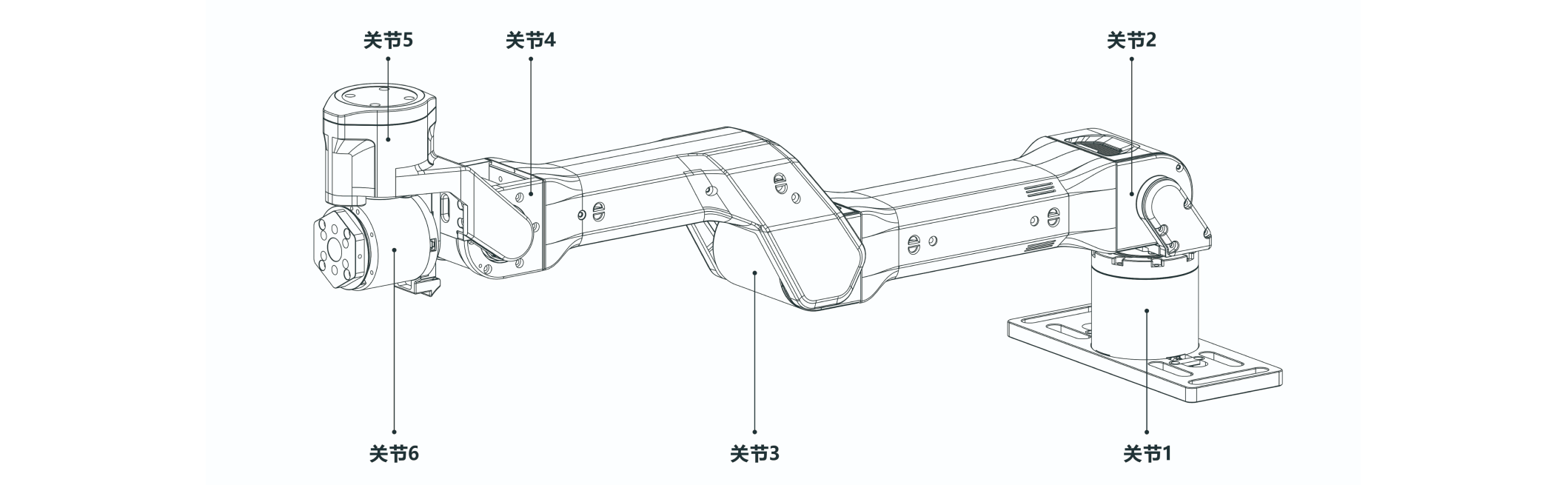 A1Z机械臂关节结构示意图
A1Z机械臂关节结构示意图
| 关节 | 额定扭矩(Nm) | 峰值扭矩(Nm) | 额定速度(rpm) | 峰值速度(rpm) | 运动范围(软件控制) | 运动范围(硬件限位保护) |
|---|---|---|---|---|---|---|
| 关节J1 | 20 | 50 | 54 | 60 | [-120°, 120°] | [-130°, 130°] |
| 关节J2 | 25 | 50 | 54 | 60 | [0°, 180°] | [0°, 202°] |
| 关节J3 | 20 | 50 | 54 | 60 | [-180°, 0°] | [-200.38°, 0°] |
| 关节J4 | 9 | 25 | 36 | 52 | [-85°, 85°] | [-91.88°, 110.38°] |
| 关节J5 | 3.5 | 7 | 100 | 150 | [-85°, 85°] | [-90°, 90°] |
| 关节J6 | 3.5 | 7 | 100 | 150 | [-115°, 115°] | [-120°, 120°] |
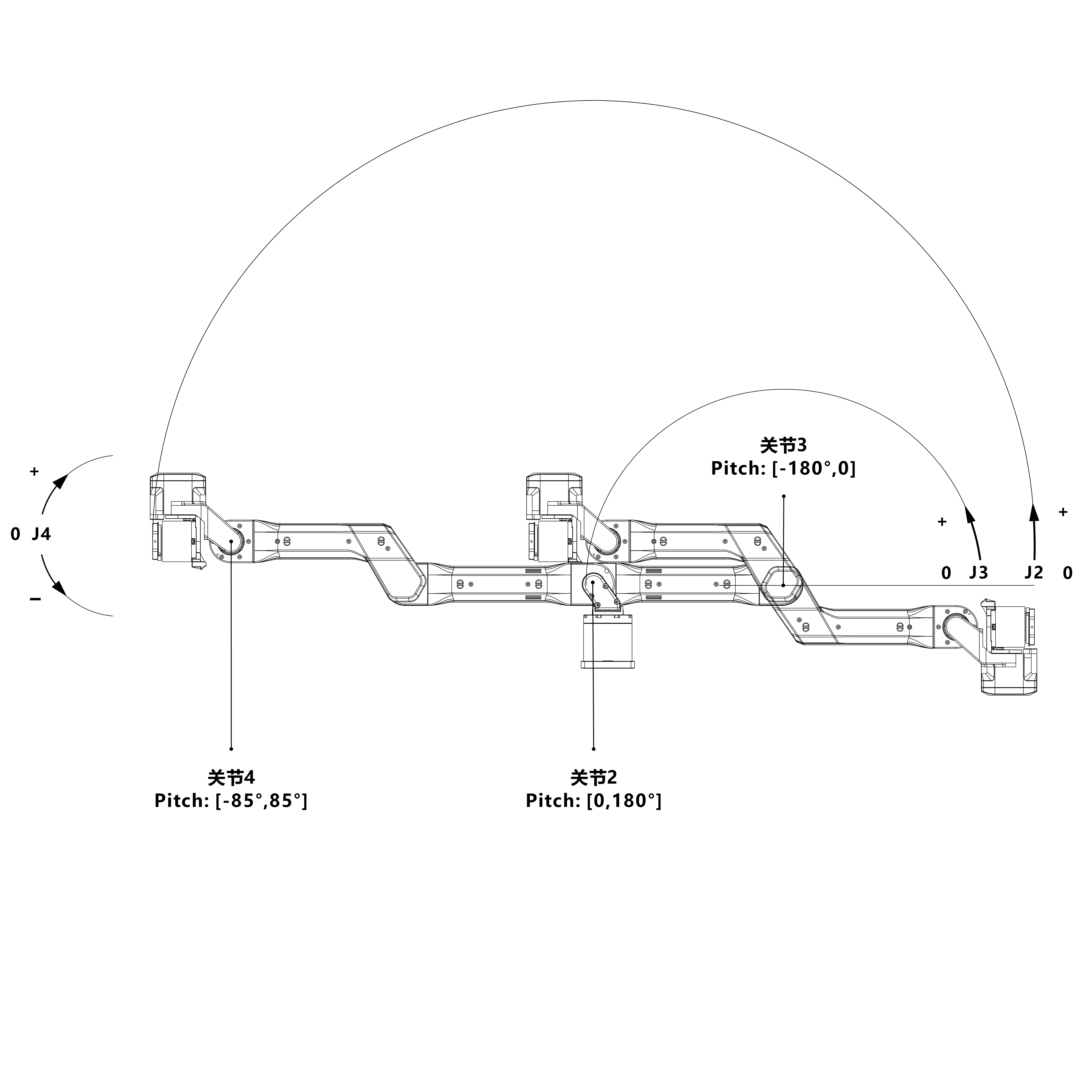
关节运动范围
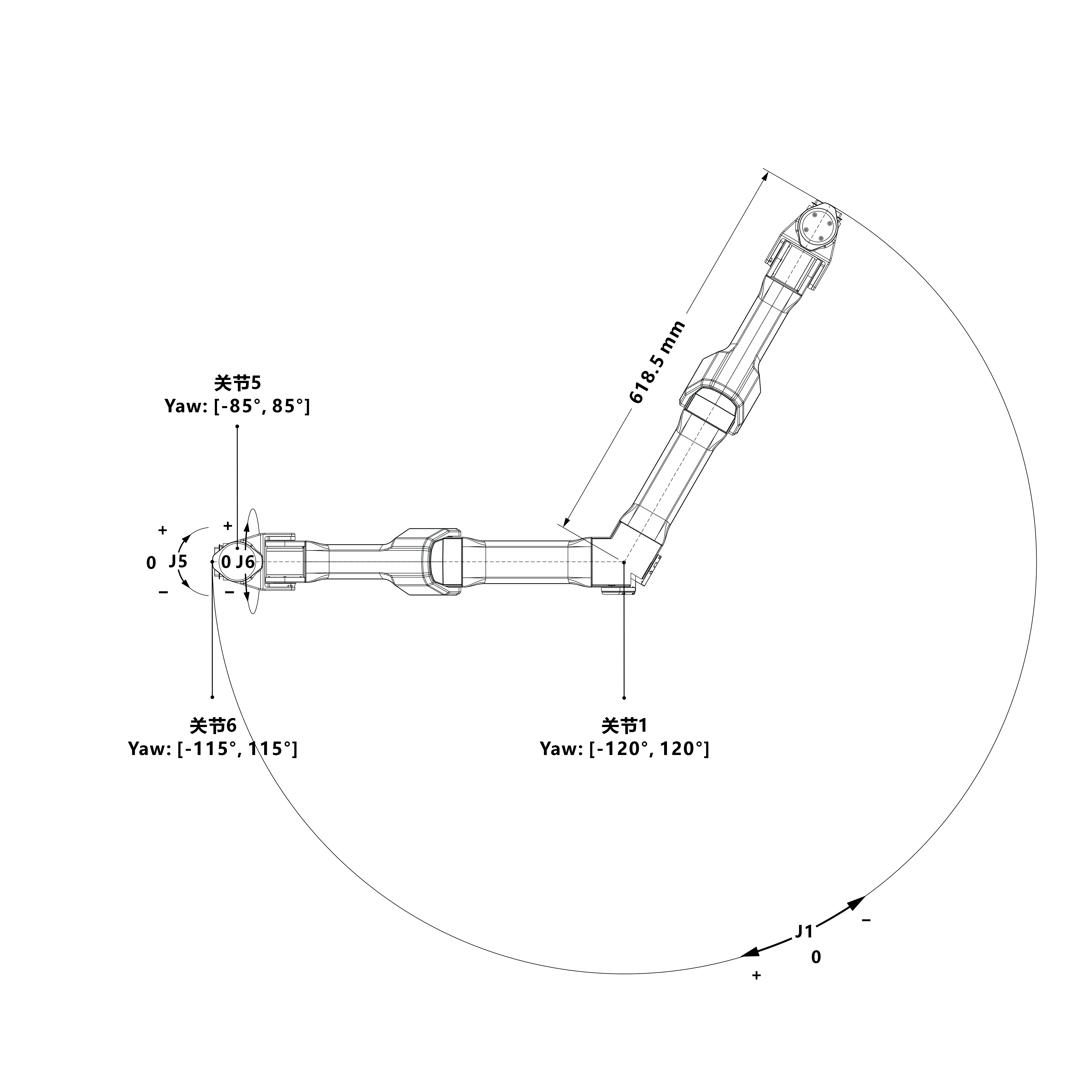
- 关节J1:在Yaw角方向的最大旋转角度为240度,旋转半径为618.5mm
- 关节J2、关节3:在Pitch角正方向的最大旋转角度均为180度
- 关节J4:在Pitch角方向的最大旋转角度为170度
- 关节J5:在Yaw角方向的最大旋转角度为170度
- 关节J6:在Roll角方向的最大旋转角度为230度
点击查看A1Z关节限位参数
接插口
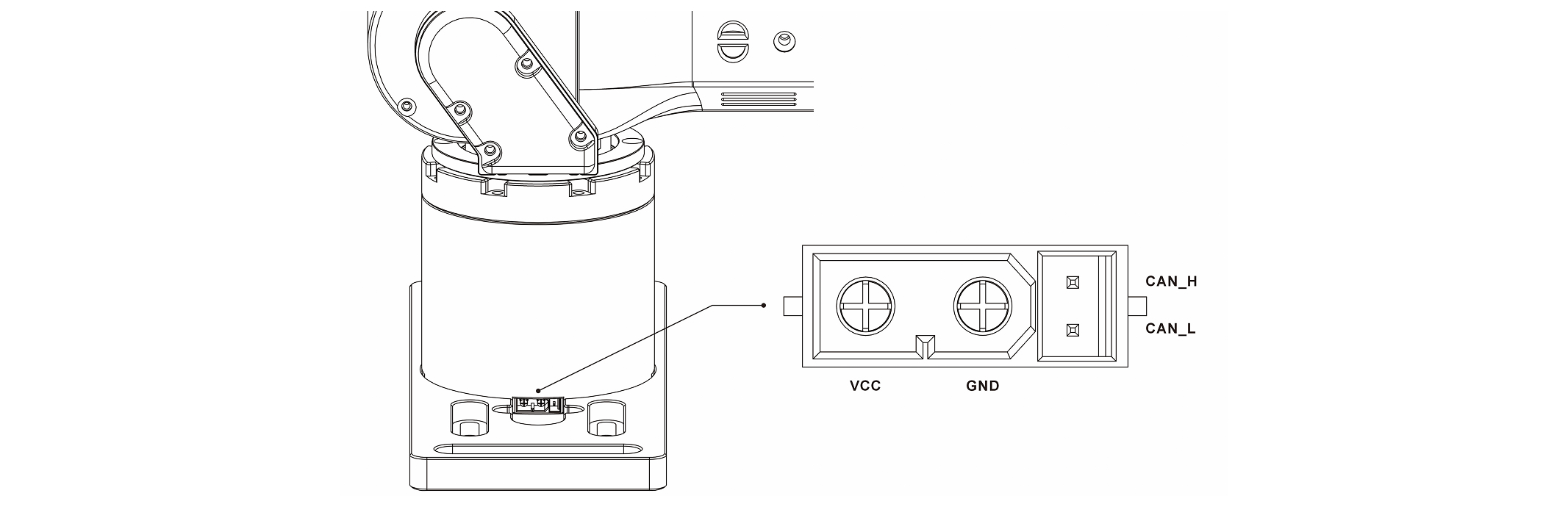 A1Z底座接插口示意图
A1Z底座接插口示意图
末端执行器
Galaxea G1Z 夹爪
Galaxea G1Z 为自研平行夹爪,产品配备一个关节电机和两指夹具。
注意:A1Z机械臂不包括夹爪,以下为标准版G1Z夹爪,如有购买需求及夹头部分客制化需求,请联系我们。
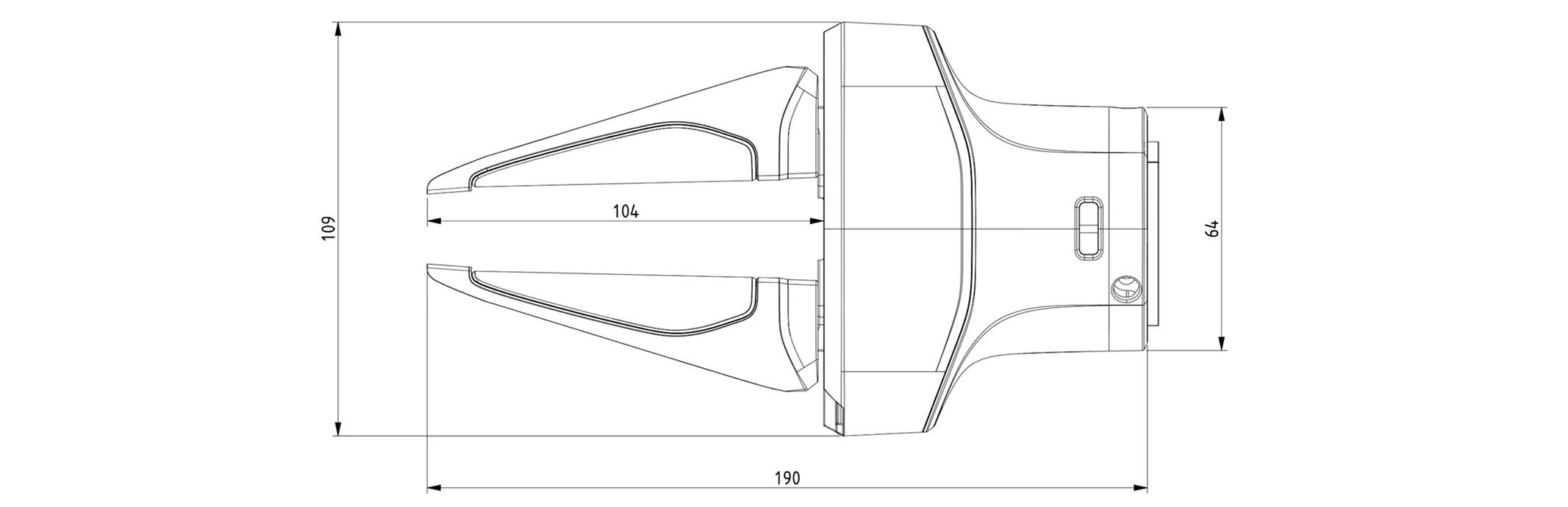 G1Z夹爪
G1Z夹爪
| 夹爪 | 参数 |
|---|---|
| 长度 | 190 mm |
| 夹爪深度 | 104 mm |
| 电机宽度 | 109 mm |
| 夹爪操作范围 | 0 ~ 104 mm |
| 夹爪额定夹持力 | 150 N |
| 开合最大速度 | 45 mm/s |
安装方式
通过以下步骤即可将夹爪G1Z安装至机械臂末端(反转步骤即可拆卸夹爪)。
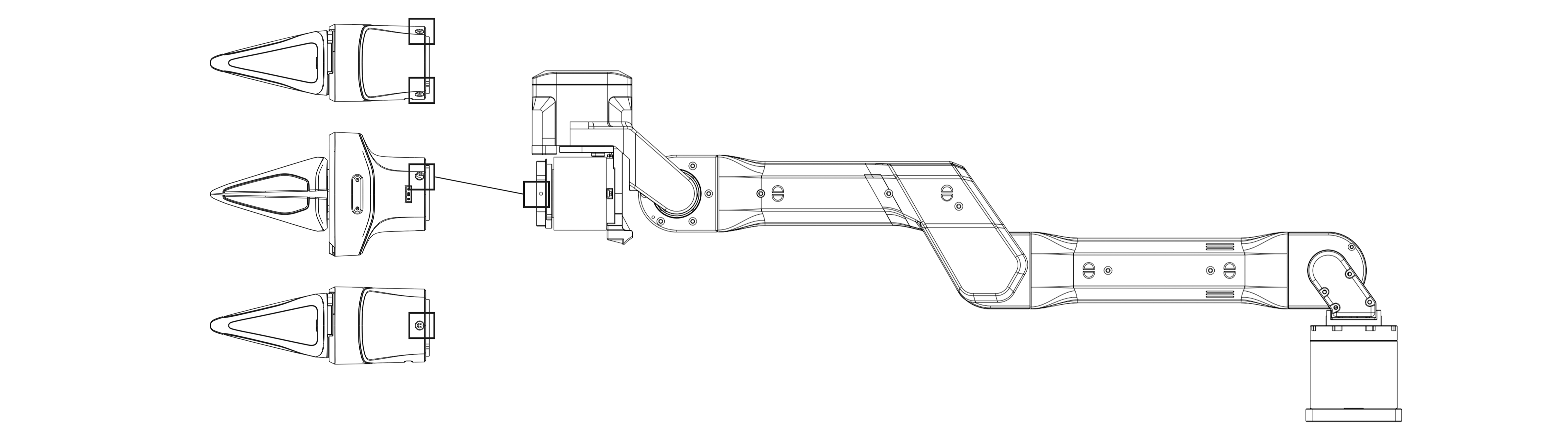 G1Z安装方式示意图
G1Z安装方式示意图
- 对齐检查:确保夹爪周�围的3个安装孔与机械臂末端的3个安装孔对齐,相机安装孔朝上;
- 螺丝固定:对齐后,使用提供的3个螺丝将夹爪固定并紧固到机械臂末端;
- 牢固检查:紧固螺丝后,再次检查夹爪的安装是否对齐并是否牢固;
- 连接线束:连接机械臂末端J6外侧的CAN线束至夹爪的通信口。