启动SDK
A1Z 六轴机械臂的 Python 控制 SDK,提供 CAN 总线电机驱动、基于 Pinocchio 的重力补偿、正/逆运动学,以及零力示教和位置保持等功能。
SDK代码架构
a1z/
├── pyproject.toml # 构建配置 (flit)
├── setup.py # setuptools 后备
├── README.md
├── a1z/ # SDK 主包
│ ├── dynamics/
│ │ └── gravity_model.py # Pinocchio RNEA 重力补偿
│ ├── motor_drivers/
│ │ ├── can_interface.py # CAN 总线封装
│ │ ├── motor_a_driver.py # MotorA 驱动 (MIT 混控)
│ │ ├── motor_b_driver.py # MotorB 驱动 + MixedMotorChain
│ │ └── utils.py # 数据结构, float↔uint 转换
│ ├── robots/
│ │ ├── robot.py # Robot Protocol (抽象接口)
│ │ ├── arm_robot.py # ArmRobot 实现 (控制回路+重力补偿)
│ │ ├── get_robot.py # 工厂函数 get_a1z_robot()
│ │ └── kinematics.py # FK/IK (Pinocchio)
│ ├── robot_models/
│ │ └── a1z/ # URDF 模型文件
│ └── utils/
│ └── utils.py # RateRecorder, 日志工具
├── examples/
│ ├── gravity_comp.py # 重力补偿示例
│ └── position_hold.py # 位置保持示例
└── tools/
├── motor_diag.py # 电机通信诊断与故障排查
└── set_zero.py # 电机零点标定
Robot Protocol (robot.py)
│
ArmRobot (arm_robot.py)
╱ │ ╲
GravityModel MixedMotorChain Kinematics
(gravity_model.py) (motor_b_driver.py) (kinematics.py)
│ ��╱ ╲ │
Pinocchio MotorA MotorB Pinocchio
(RNEA) (motor_a_driver) (motor_b_driver) (FK/IK)
╲ ╱
python-can (SocketCAN)
SDK依赖
- Python版本: 支持Python 3.10版本及更高版本
- 操作系统与通信接口: 需要使用Linux系统(例如 Ubuntu),并且电脑具备CAN总线硬件接口(一种用于连接机器人的控制总线)。
SDK通过Linux下的SocketCAN功能与机器人通信(只要您的Linux系统正确配置了CAN接口即可,无需额外安装驱动。)
- URDF模型文件: SDK安装包内已包含机器人模型文件(URDF格式),无需手动下载。默认使用的模型文件是
A1Z_Flange.urdf,路径在a1z/robot_models/a1z/。- 同时,也可以在星海图开源GitHub上获取URDF模型文件:
安装SDK
cd /path/to/a1z
# 开发模式安装(推荐)
pip install -e .
# 或直接安装
pip install .
依赖会自动安装:numpy、python-can>=4.0以及pin(Pinocchio)。
配置CAN总线(SocketCAN 模式)
注意:检查can盒电阻是否正确安装!
使用 HHS USB-CANFD 适配器(VID/PID a8fa:8598):
# 1. 加载驱动
sudo modprobe gs_usb
# 2. 将 HHS 适配器绑定到 gs_usb(已绑定时忽略报错)
sudo sh -c 'echo "a8fa 8598" > /sys/bus/usb/drivers/gs_usb/new_id' 2>/dev/null || true
# 3. 确认接口出现(单适配器通常为 can0)
ip link show type can
# 4. 配置并启动(1 Mbps)
sudo ip link set can0 type can bitrate 1000000
sudo ip link set can0 up
CAN线连接方式:
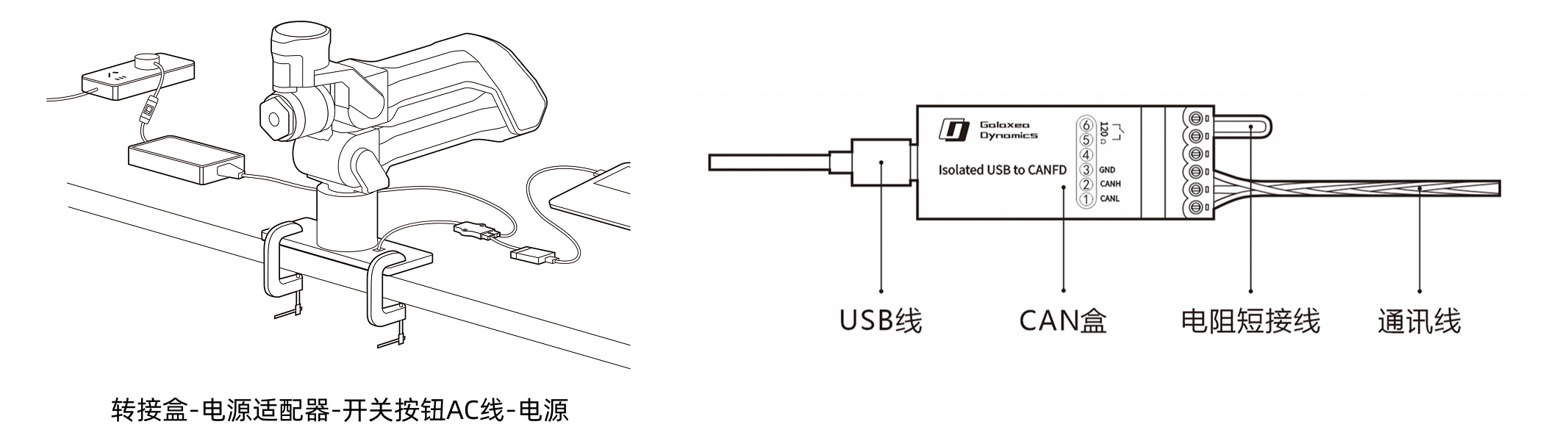 A1Z本体与CAN盒连接示意图
A1Z本体与CAN盒连接示意图
按照以下步骤连接相关线束:
- 通信部分:机械臂自带线接至转接盒,CAN盒自带线接至转接盒,USB线连接CAN盒与上位机。
- 供电部分:电源适配器自带线接至转接盒,带开关的AC线连接电源适配器与电源。
为将CAN匹配电阻接入CAN总线,已原装图示⑤⑥引脚的120Ω电阻短接线。
注意:如拆掉原装短接线,为保证CAN通信稳定,请您在总线最远两端各并联1个120Ω匹配电阻。
使用example运行脚本
# 零力漂浮(默认 URDF A1Z_Flange.urdf,末端无负载)
# 从小补偿因子开始(推荐首次调试方式)
python examples/gravity_comp.py --gravity_factor 0.3
# 确认补偿方向正确后提升到全补偿
python examples/gravity_comp.py --gravity_factor 1.0
# 位置保持模式
python examples/gravity_comp.py --mode hold
# 位置保持 + 移动到目标
python examples/position_hold.py --q_target_deg 0,30,-20,-15,0,0 --speed 0.5