同构遥操作
1. 产品介绍
R1 ProTeleop平台采用按比例缩小设计,完美复刻R1 Pro 的各项功能,实现全身力反馈遥操作、全关节映射,并支持本体端力反馈至遥操端,确保操作精准同步,具备毫米级精度与毫秒级响应速度。
接下来的教程将详细指导您如何安装和启动 R1 Pro Teleop,助您迅速体验这款高性能遥操作平台。
2. 开箱
收到产品时,请根据以下货品交付清单检查包装盒内的物品是否齐全。
| 物品 | 数量 |
|---|---|
| R1 Pro-T 本体 | 1 |
| R1 Pro-T Box(电源/通信盒) | 1 |
| 电源适配器(24V) | 1 |
| 4芯航插——XT30母 (2+2) | 1 |
| 2芯航插——XT60公 | 1 |
| USB-CAN转换线 | 1 |
| USB-Type-C充电线 | 2 |
| 魔术贴绑带 | 2 |
| G夹固定器 | 2 |
| G夹固定板 | 1 |
| 内六角扳手 | 1(套) |
| M6x16 六角螺丝 | 8 |
3. 启动前准备
3.1 硬件准备
| 物品 | 数量 | 备注 |
|---|---|---|
| R1Pro-T 上位机(笔记本电脑) | 1 | 系统:ROS2 Ubuntu22.04
注意:请勿在虚拟机中使用R1 Pro-T上位机,否则可能无法连接蓝牙遥控器。 |
| 局域网 | 1 | 用于R1 Pro和R1 Pro-T之间的无线通信。 |
| 网线 | 1 | 用于查看R1 Pro的IP地址。 |
1. 软件准备
请下载ROS2 SDK并使用Ubuntu22.04系统,即可执行以下操作。
1.1 安装软件依赖环境
请在R1 Pro-T上位机安装以下环境依赖。
sudo apt install tmuxp
sudo apt install tmux
1.2 多机通信配置
注意:确保R1Pro和R1Pro-T在同一网关时,分别修改R1 Pro和R1 Pro-T上位机环境的~/.bashrc文件。
-
在R1 Pro ECU的
~/.bashrc文件末尾加入以下内容:export ROS_DOMAIN_ID=79 -
在R1 Pro-T上位机的
~/.bashrc文件末尾加入以下内容:export ROS_DOMAIN_ID=79 -
示例:
R1 Pro和R1 Pro-T上位机同处于同一网关下,分别修改R1Pro和R1Pro-T上位机的
~/.bashrc。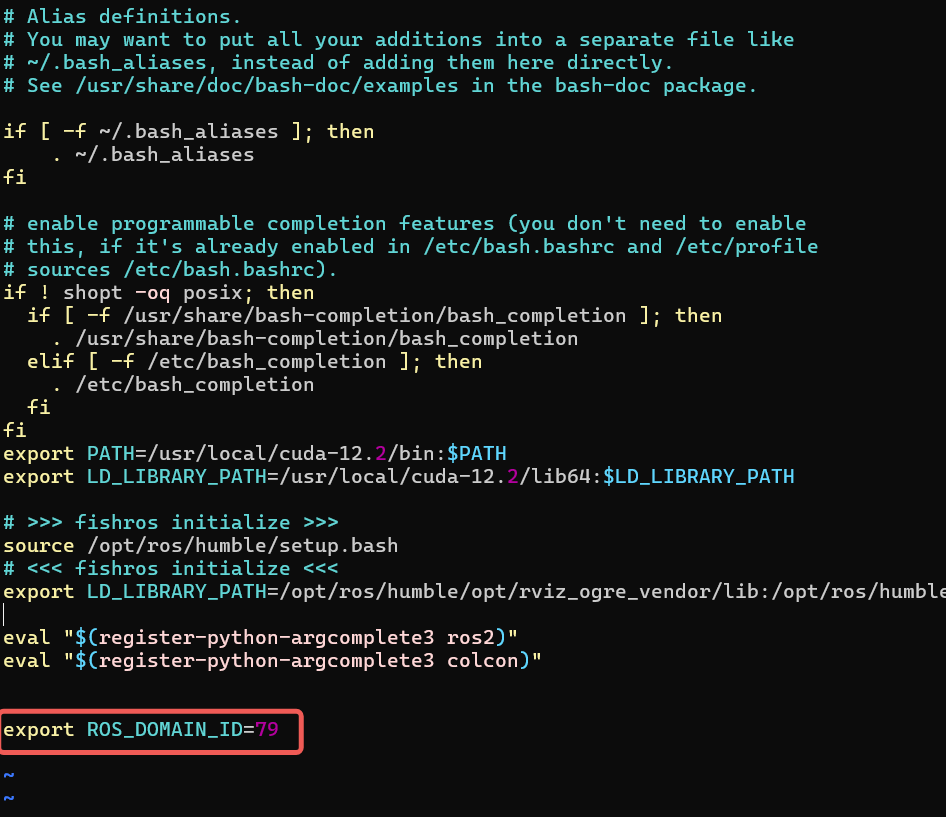
2. 连接R1 Pro-T 本体
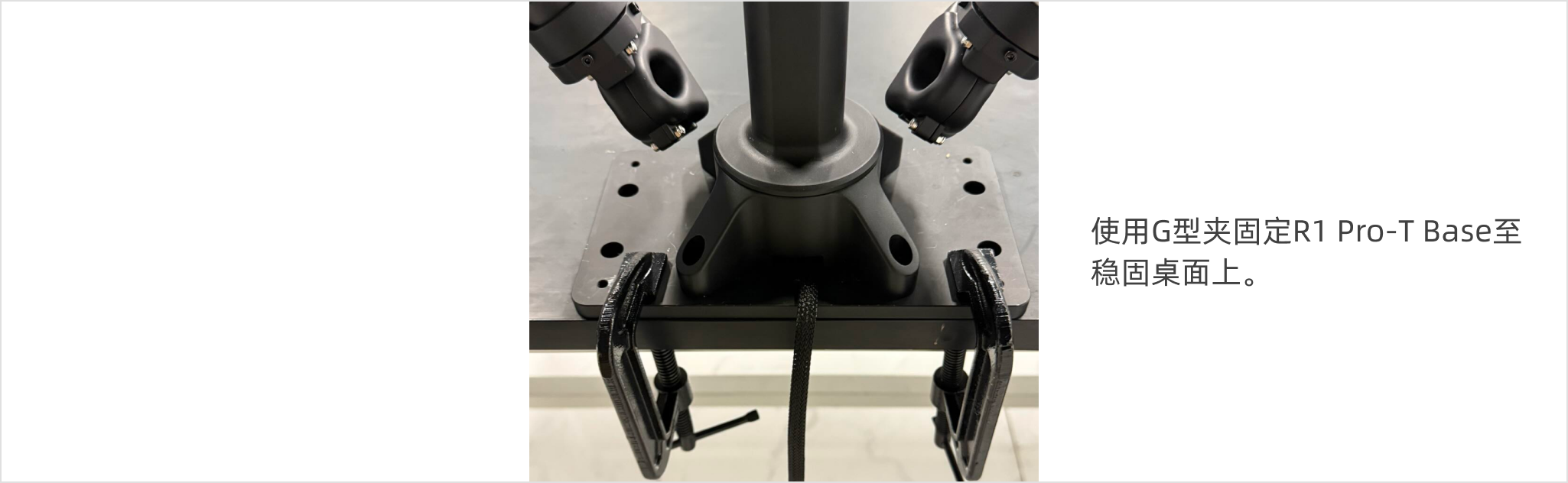
2.1 固定设备
请使用G夹固定器将R1-T Base固定至桌面,如下图所示:
2.2 连接设备
请按下图所示连接设备。
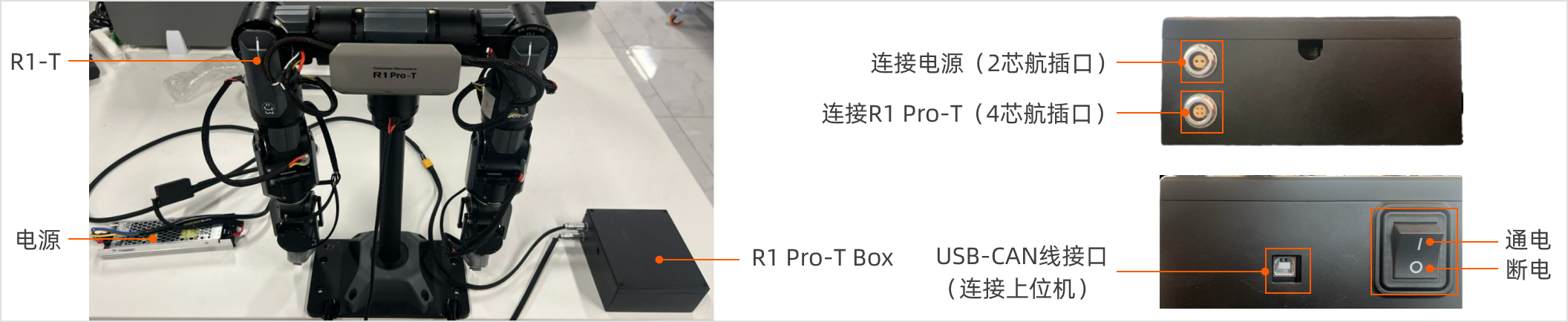
- 将2芯航插连接线的一端连接至R1 Pro-T Box,另一端连接至电源适配器的XT60母头。
- 将4芯航插连接线的一端连接至R1 Pro-T Box,另一端连接至R1 Pro-T的躯干电机。
- 将蓝色USB-CAN线一端连至接R1 Pro-T Box,另一端连接至上位机的USB接口。
注意:连接完成后不要立刻上电,请按照以下步骤继续操作。
2.3 打开电源
将R1 Pro-T固定至桌面后,按下图所示的初始位置摆放手臂和躯干,确保左右臂的J5、J6、J7电机及R1 Pro-T均处于零点位置后,然后打开R1 Pro-T Box上的电源按键上电。
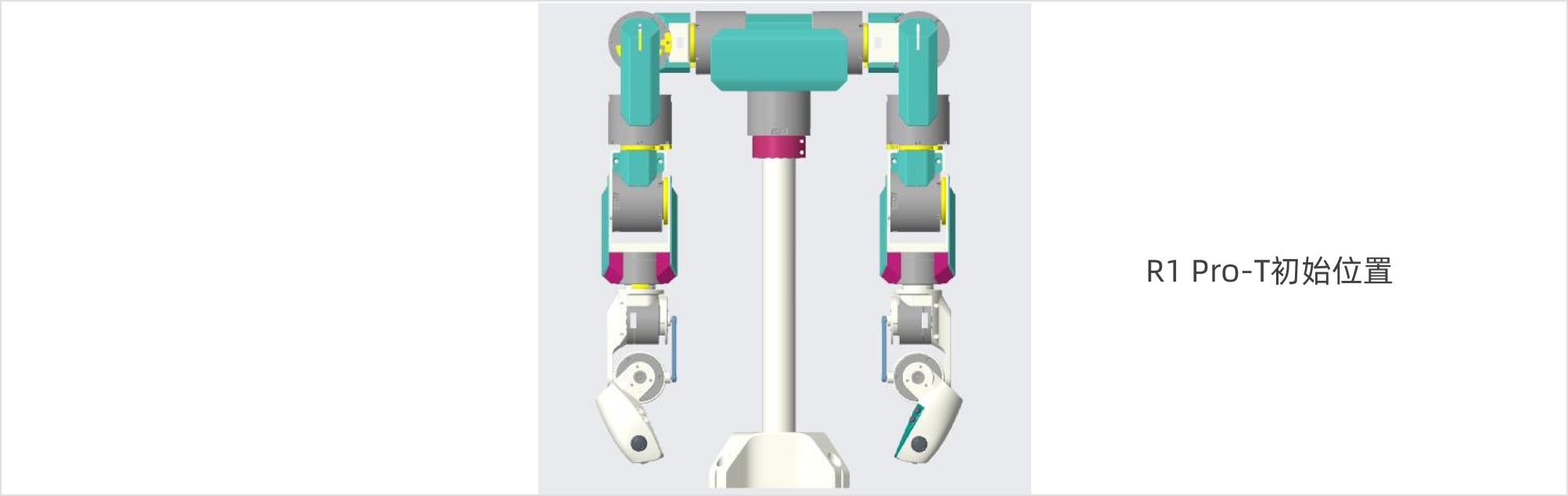
注意:每次��启动R1 Pro-T之前,请务必将其姿态调整为零点姿态。
2.4 连接蓝牙遥控手柄
请务必依次将左臂和右臂连接至R1 Pro-T上位机,确保**先连接左臂手柄,再连接右臂手柄**。
注意:由于程序设置,如若手柄连接顺序错误,请关闭两个蓝牙手柄电源后重新上电,再按正确顺序进行连接。
2.4.1 遥控器使用说明

2.4.2 连接蓝牙
- 按下电源开关,打开手柄蓝牙。
- 打开上位机的蓝牙,连接两个名称为“HID”的设备。
- 连接后显示“设备已连接”。输入以下命令确认是否连接成功:
当同时返回
ls /dev/input/ | grep jsjs0(后续代码将此设备符识别为左臂手柄)和js1(后续代码将此设备符识别为右臂手柄),即为连接成功。
3. 启动SDK
3.1 启动R1 Pro SDK
使用以下脚本,一键启动R1 Pro。
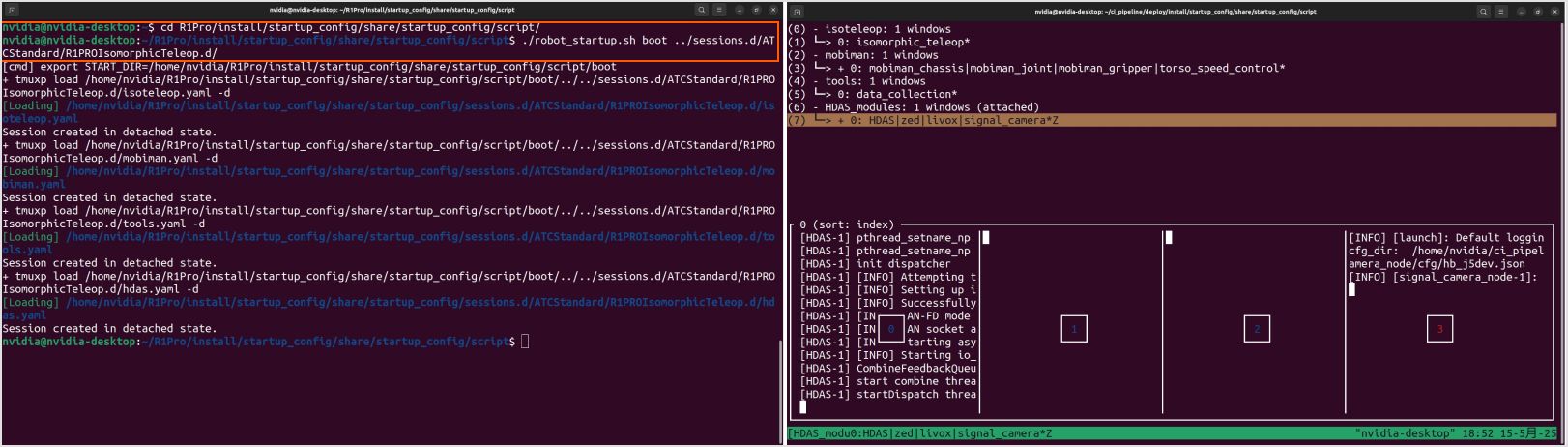
cd ${SDK_path}/install/startup_config/share/startup_config/script/
./robot_startup.sh boot ../sessions.d/ATCStandard/R1PROIsomorphicTeleop.d/
此脚本会拉起HDAS(通信协议节点)、Mobiman(双臂、躯干、底盘、夹爪等运控节点)、传感器(相机、雷达)、数据采集节点(data_collection)等。
3.2 启动R1 Pro-T SDK
注意:此步骤须在R1 Pro-T上位机中执行。
在控制R1 Teleop的整个过程中,您需要打开多个窗口。我们建议您使用TMUX。常�用指令如下:
- 创建新窗口:按
Ctrl + B然后按C。 - 切换窗口:按
Ctrl + B然后按数字,数字表示窗口的序号。
现在,您可以按照以下步骤启动CAN驱动程序。
- 启动FDCAN通信。
sudo ip link set dev can0 type can bitrate 1000000 dbitrate 5000000 fd on
sudo ip link set up can0 - 使用快捷启动脚本拉起R1 Pro-T上位机的所有节点。
cd ${SDK_path}/install/startup_config/share/startup_config/script/
./robot_startup.sh boot ../sessions.d/ATCHostStandard/R1PROT.d/
完成以上步骤后,等待3-5秒钟,便可操控R1 Pro-T。
4. 数据采集
4.1 数据格式介绍
数据采集的文件格式为rosbag,文件后缀为*.bag。
4.2 数据获取
默认存储路径:/home/nvidia/GalaxeaDataset/{date}/
date 为当天日期,格式如下:20250307
4.3 数据落盘文件介绍
数据以 rosbag + json 格式保存,文件一一对应。
# 例如以下两个文件代表了一个数据包:
S2R12000P18245_20240213173320125_RAW.bag
S2R12000P18245_20240213173320125_RAW.json
# 格式为 robot_serial_number+timestamp+RAW
# robot_serial_number:机器人序列号,位于 /opt/galaxea/body/RSN,机器人出厂时已配置;如果没有,请联系技术支持。
# timestamp:数据采集的时间戳精确到毫秒
# RAW:代表数据采集原始落盘数据
4.4 录制数据
使用左手柄进行数据录制操作:
| 功能 | 操作 | 描述 |
|---|---|---|
| 开启录制 | 点击一下左手柄 C 键 | 开始数据录制 |
| 停止录制 | 点击一下左手柄 D 键 | 停止数据录制 |
| 删除当前录制 | 点击��一下左手柄 C 键 | 若已经有录制在进行中,再点击一下C键将结束并删除当前录制(两次按键的间隔在5秒以上),数据不会落盘。 |
如在安装和启动过程中有任何问题,请及时与我们联系至support@galaxea-dynamics.com或致电4008 780 980获得技术支持!