软件架构
当前的Galaxea R1 Pro控制图如下所示,主体由驱动层和运控层组成。驱动层包括底盘、躯干、双臂和各传感器的部分;运控层包括底盘控制、关节角度控制、手臂姿态控制等等。
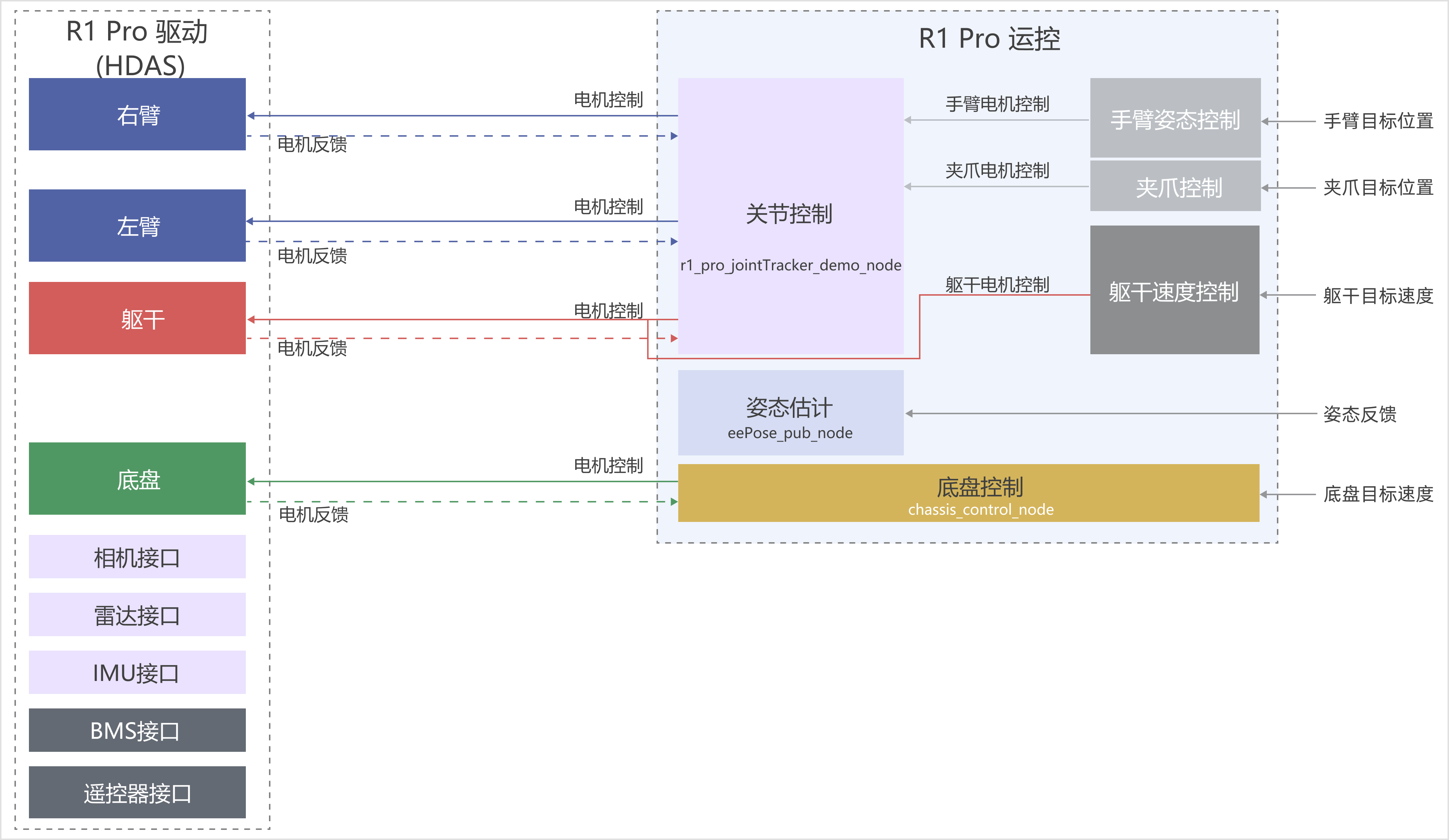
在SDK中各部分被封装为多个模块,详情如下:
| 模块名称 | 包含组件 | 相关launch文件 |
|---|---|---|
| HDAS | Arms Driver Interface Torso Driver Interface Chassis Driver Interface IMU Interface BMS Interface Remote Controller Interface |
r1pro.py |
| mobiman | Arm Joint Control
Gripper Control Arm Pose Control Torso Joint Control Torso Speed Control Chassis Control End Effector Pose Estimation |
r1_pro_jointTrackerdemo.py
r1_pro_left_arm_relaxed_ik.py r1_pro_right_arm_relaxed_ik.py r1_pro_chassis_control_launch.py torso_control_example_launch.py r1_gripperController.py |
| signal_camera | Camera Interface | signal_camera.py |
| livox_ros_driver2 | LiDAR Interface | msg_MID360_launch.py |