开箱指南
在本教程中,我们将提供详细的说明,指导您如何正确地开箱Galaxea R1,连接电缆,安装机械臂,以及如何远程控制R1,以实现更好的通信和探索更多功能。
开箱启动教学
1.物品清单检查
收到产品时,请根据以下清单检查包装盒内的物品是否齐全。(部分物品在航空箱内)
| 物品 | 数量 |
|---|---|
| R1 本体 | 1 |
| A1 机械臂 | 2 |
| G1 夹爪 | 2 |
| 遥控器 | 1 |
| 六角扳手套组 | 1 |
| 充电器&电缆线套组 | 1 |
| 电缆线束包 | 1 |
此外,仍需准备以下物品:
| 物品 | 数量 |
|---|---|
| 显示器&键盘&鼠标 | 1 |
| 电脑 | 1 |
| WiFi 网络 | 1 |
| HDMI线 | 1 |
2. 开箱

2.1 打开箱锁
找到箱子左侧的两个锁,打开锁片,并逆时针旋转即可打开箱门。
2.2 放下盖板
箱门前侧有一个用于使R1沿其下滑的木板。将板子放平到地面上。
2.3 移除箱内固定件
使用L型六角扳手(M6)卸下六个固定螺丝,如下图所示。
2.4 拉出R1
将机器人从箱子里拉出来,过程中请避免碰撞。
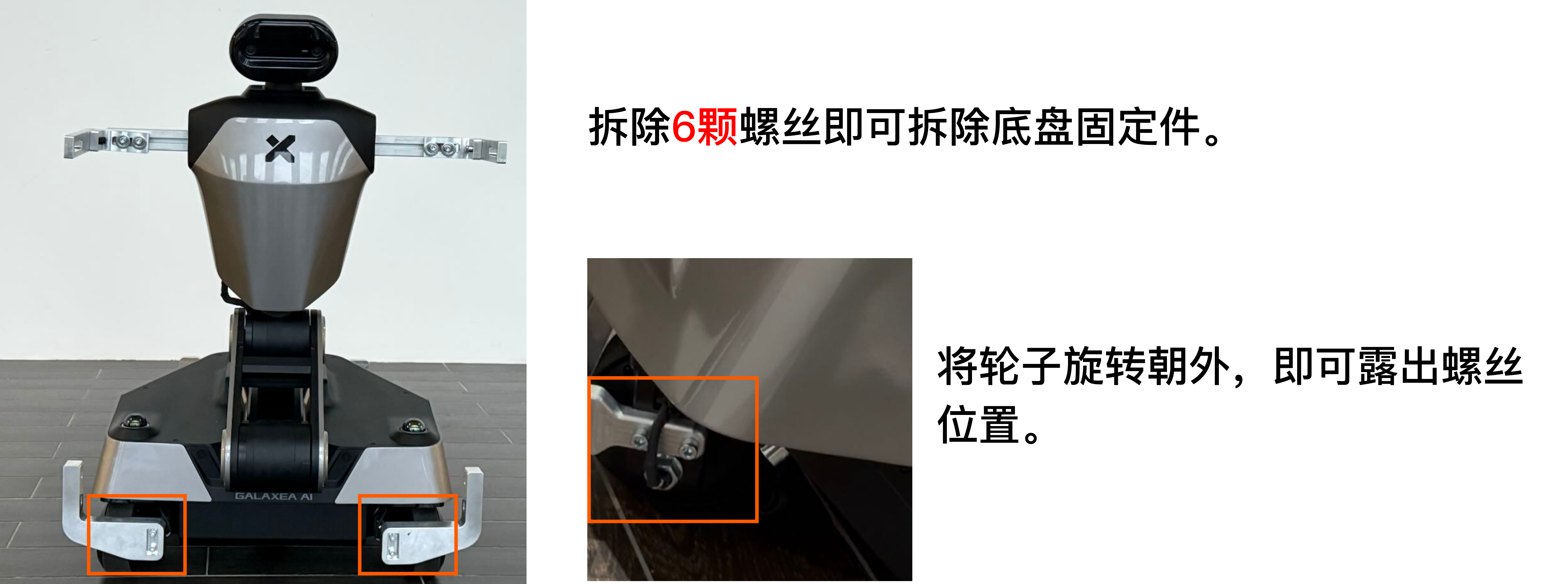
2.5 移除底盘固定件
底盘的前后均有固定件。
- 将装有固定件的轮子旋转到两侧,即可露出固定螺丝。
- 使用L型六角扳手(M6)卸下轮子上的六个固定螺丝。
- 将轮子转回原位。
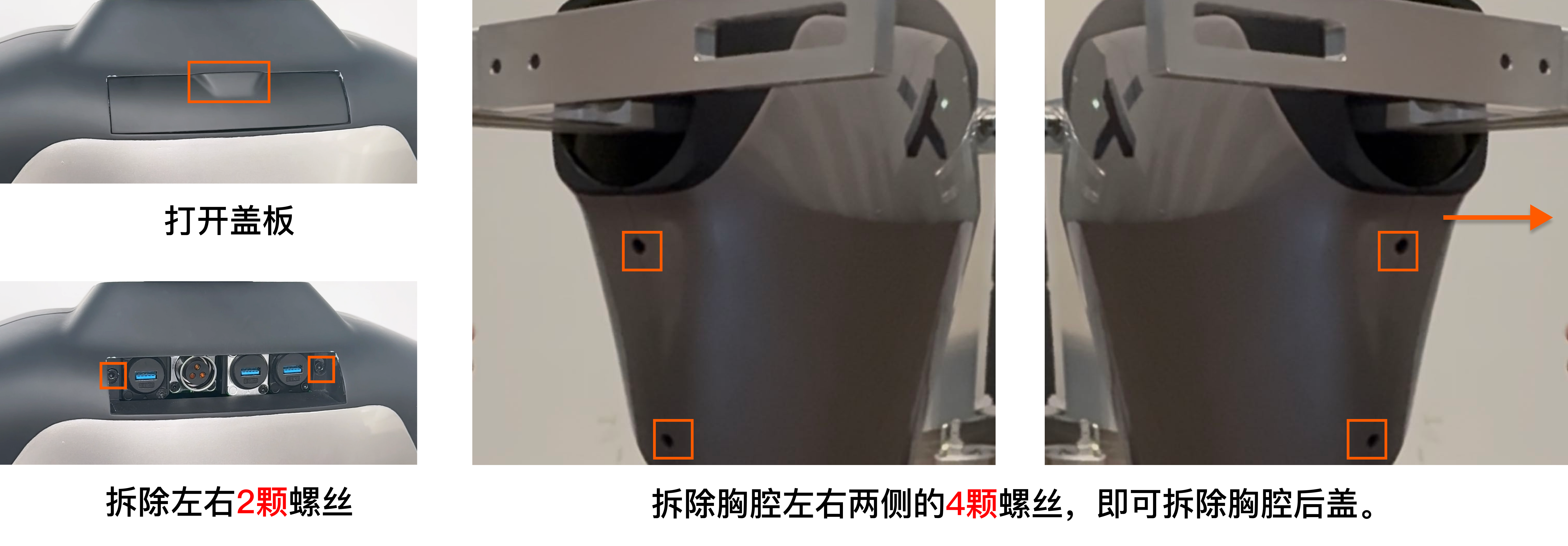
2.6 拆卸背部盖板
请按照以下步骤拆卸胸腔后盖:
- 打开背部盖板上的外设接口盖。
- 使用L型六角扳手(M4)卸下盖板下的2颗M4螺丝。
- 使用L型六角扳手(M5)卸下胸腔盖板侧面的4颗M5螺丝。
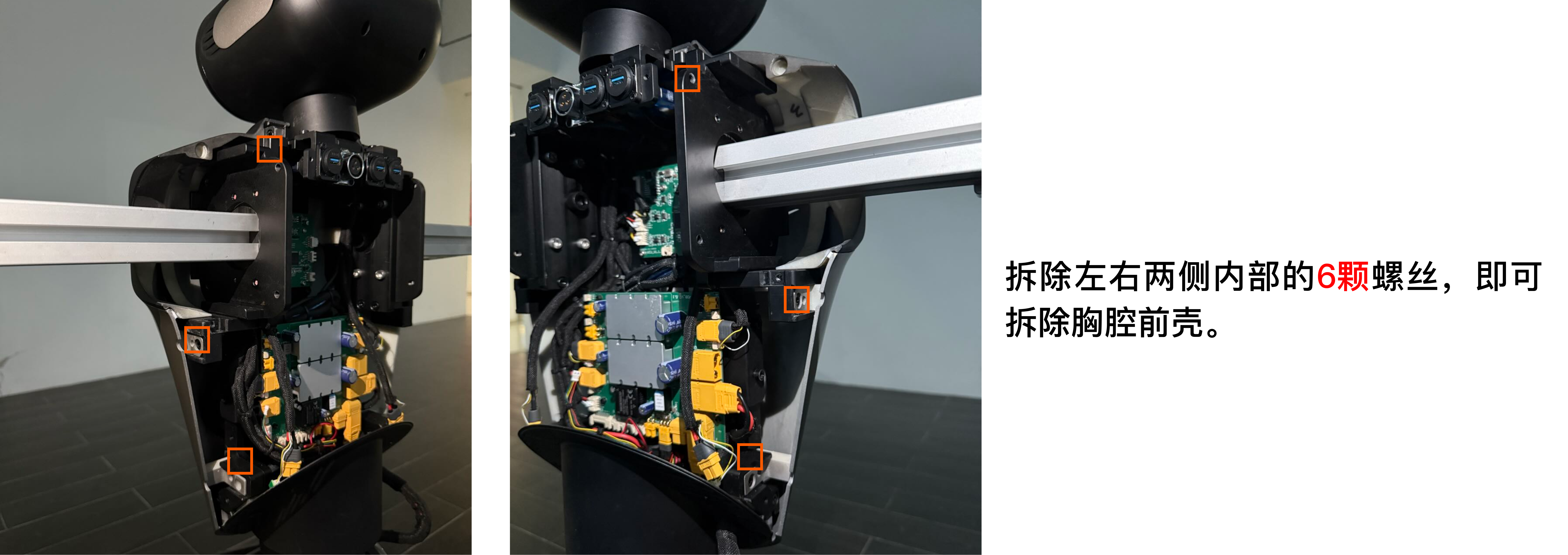
2.7 拆卸前侧盖板
使用L型六角扳手(M5)卸下胸腔两侧的六个M5螺丝,如下图所示。
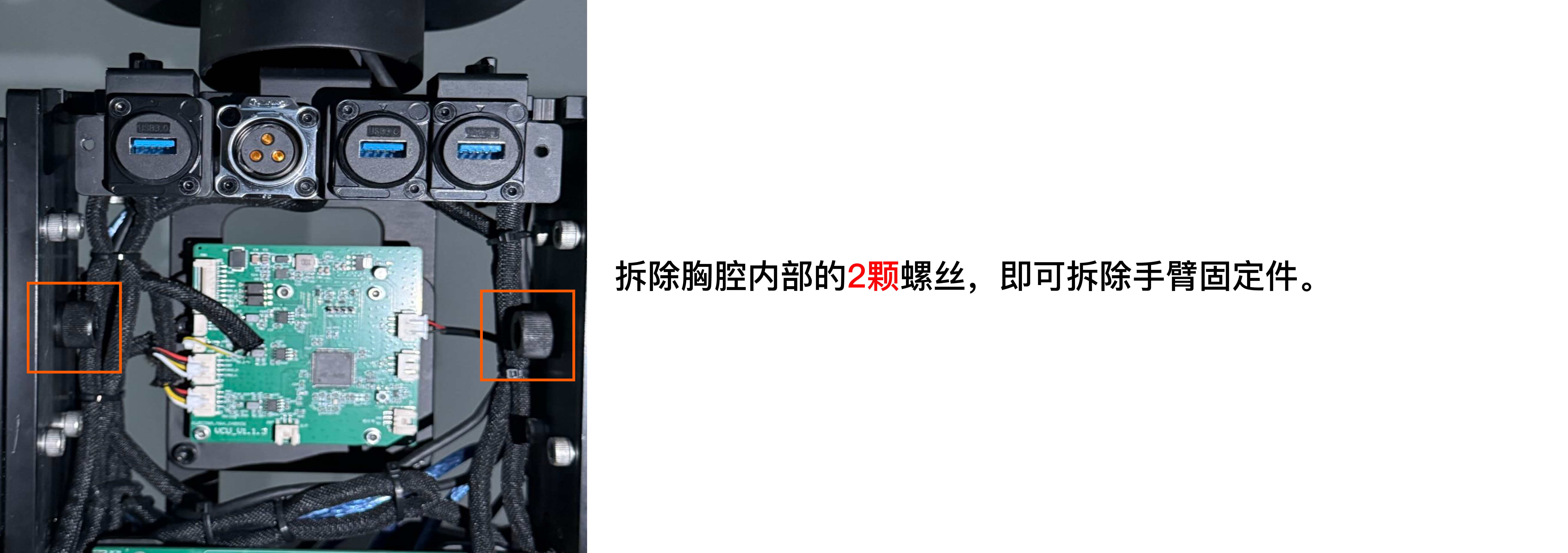
2.8 移除手臂固定件
使用L型六角扳手(M5)卸下胸腔内的两个螺丝,如下图所示。
3. R1开机
3.1 连接HDMI和USB
重要提示:为了您的安全,请在连接任何电缆之前先关闭R1的电源。
请按照以下步骤连接R1:
- 使用L型六角扳手(M3)卸下底盘外设接口盖上的2颗M3螺丝。
- 将HDMI电缆连接到底盘和显示器。请确保连接牢固,避免松动。
- 将USB接口连接到鼠标、键盘和胸腔。请确保连接牢固,避免松动。

3.2 开机
按下底盘后侧底部的船形电源按钮,即可开机。关闭电源按钮,即可关机。 注意:请��保持紧急停止按钮抬起,并打开位于底盘左后底部的船形电源按钮。如果电源之前是开着的,您需要先关闭再打开;否则,显示器可能无法工作。
3.2.1 充电
如果机器人的底盘内有电池但电量耗尽,应先充电然后再打开按钮。电源端口位于底盘后侧底部。
充电步骤如下所示:
- 拧开电源充电口盖。
- 将电源线插入端口。当充电器上的红灯亮起时,且机器人底盘侧边的电源指示灯橙绿色频闪状态,表示机器人正在充电。
3.2.2 更换电池
如果机器人的底盘内没有电池,请先安装电池。电池位于底盘右侧底部。
更换电池步骤如下所示:
- 拆除底盘侧边盖板的2个螺丝,并向有滑动盖板即可拆卸。
- 将电池推入底盘。
- 将电池电缆连接到底盘。
- 关闭盖板。

4. 连接R1
4.1 本地连接
如果不需要远程连接和控制R1,请继续在原有的显示器和键盘上操作,并保持HDMI和USB电缆连接。然后进行第4.3节-启动CAN驱动程序,继续后续流程。
4.2 远程连接
4.2.1 获取IP地址
R1开机后,等待显示器显示桌面。
-
点击“设置”并连接WiFi。
-
打开终端并输入以下命令:
ifconfig mlan0 -
找到
mlan0。R1 Orin的IP地址是:192.168.xxx.xxx。
4.2.2 通过SSH连接
- 使用另一台计算机。
- 在终端输入以下命令以连接Orin。
ssh nvidia@IP address
# Enter the password (default: nvidia) - 如果连接成功,请断开HDMI和USB电缆,并关闭底盘和胸腔的外设接口盖,以免影响活动范围。
- 然后进行第4.3节-启动CAN驱动程序,继续后续流程。
如果连接失败,请及时联系我们support@galaxea-dynamics.com提供技术支持。
4.3 启动CAN驱动程序
在控制R1的整个过程中,您需要打开多个终端。我们建议您使用TMUX。常用指令如下:
- 创建新终端:按
Ctrl + B然后按C。 - 切换终端:按
Ctrl + B然后按数字,数字表示终端窗口的序号。
现在,请按照以下步骤启动CAN驱动程序。
-
启动TMUX。
tmux -
启动FDCAN通信。
sudo ip link set dev can0 type can bitrate 1000000 dbitrate 5000000 fd on
sudo ip link set up can0
# 若出现“RTNETLINK answers: Device or resource busy”这个错误信息,通常表示你尝试配置的设备(如网络接口或CAN收发器)已经被配置并且正在运行中。 -
启动roscore。
roscore -
按下
Ctrl + B加C,创建新终端,然后启动HDAS。source ~/{your_download_path}/install/setup.bash
roslaunch HDAS r1.launch
4.4 第一次自检
重要提示:在对R1进行任何操作之前,您必须完成R1自检以确保安全。
请确保:
- R1已出箱且所有固定件已移除。
- R1保持折叠状态,没有安装机械臂。
按照以下步骤进行第一次自检。
-
按
Ctrl + B然后按C创建新终端。然后启动自检。source ~/{your_download_path}/install/setup.bash
rosrun HDAS check_node
# 输入0 (0 表示安装机械臂后的自检;1表示未装机械臂时的自检) -
如果显示“self-check completed”,如下图所示,表示自检完成,请按
Ctrl + C退出。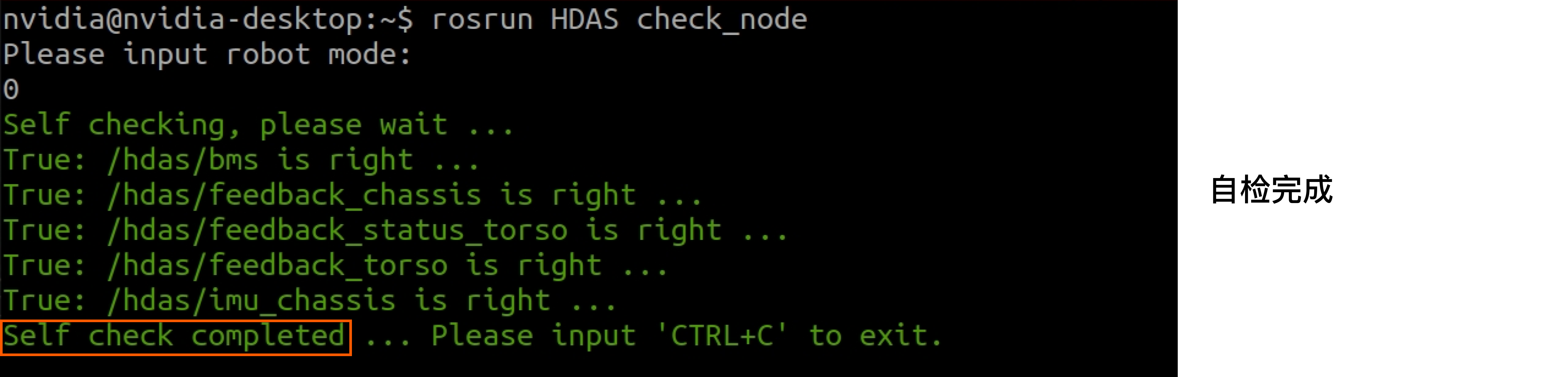
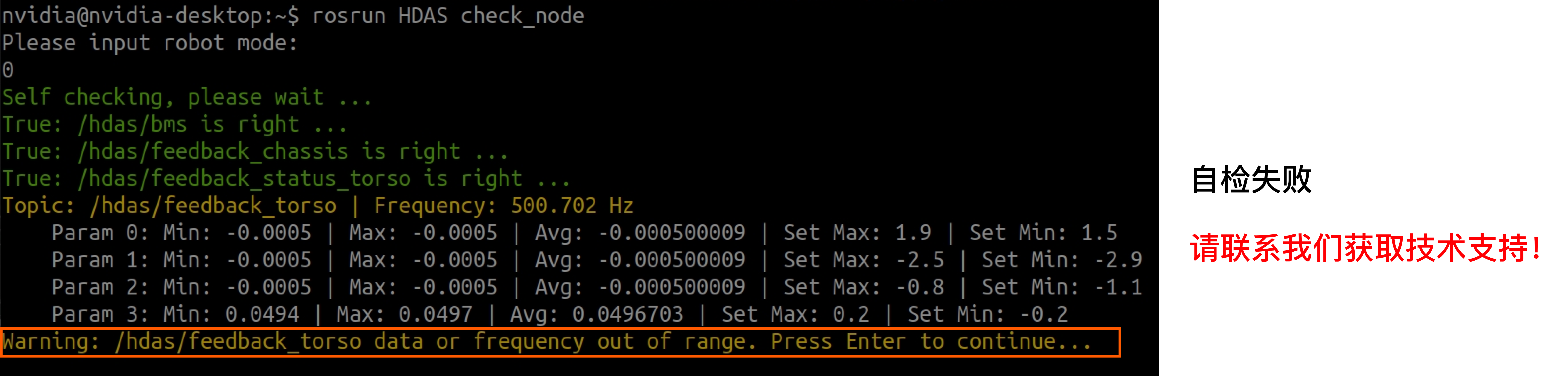
-
如果出现警告,如下图所示,请及时联系我们提供技术支持。
4.5 站立
重要提示:为了您的安全,请确保R1已出箱,且没有任何干扰或固定件。否则,躯干可能会进入自锁保护状态。
完成自检后,您可以通过命令躯干和底盘,并使用遥控器使R1站立起来。
4.5.1 启动躯干控制
按下 Ctrl + B 加 C 创建新终端,启动臂部和躯干控制。
source ~/{your_download_path}/install/setup.bash
roslaunch mobiman r1_jointTrackerdemo.launch
4.5.2 启动底盘控制
按下 Ctrl + B 加 C 创建新终端,启动底盘控制。
source ~/{your_download_path}/install/setup.bash
roslaunch mobiman r1_chassis_control.launch
4.5.3 上位机控制
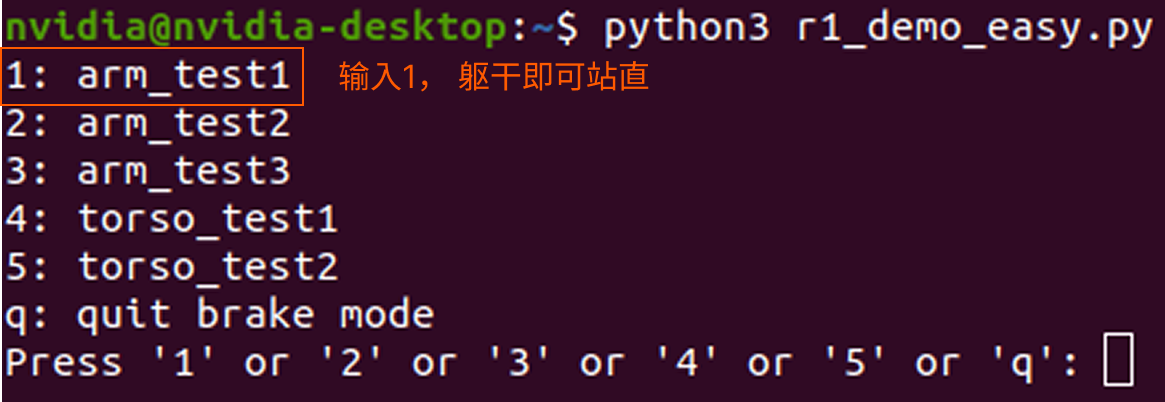
按下Ctrl + B然后按C创建一个新终端,执行以下脚本。
source ~/work/galaxea/install/setup.bash
python3 r1_demo_easy.py
输入1并按Enter,R1 Pro将站立,按q即可退出Demo脚本。
5. 安装手臂
重要提示:为了您的安全,请在安装手臂之前使R1站立并关闭电源。
-
将夹爪连接到手臂。拆除夹爪,反向操作即可。
- 对齐检查:确保夹爪周围的3个安装孔与机械臂末端的3个安装孔对齐。
- 螺丝固定:对齐后,使用提供的3个螺丝将夹爪固定并紧固到机械臂末端。
- 牢固检查:紧固螺丝后,再次检查夹爪的安装是否对齐并是否牢固。
-
使用六角L型扳手(5mm)和4颗M6螺丝固定手臂。 注意:在安装R1手臂时,您必须确保手臂底座上的端口朝向后方,如下图所示。
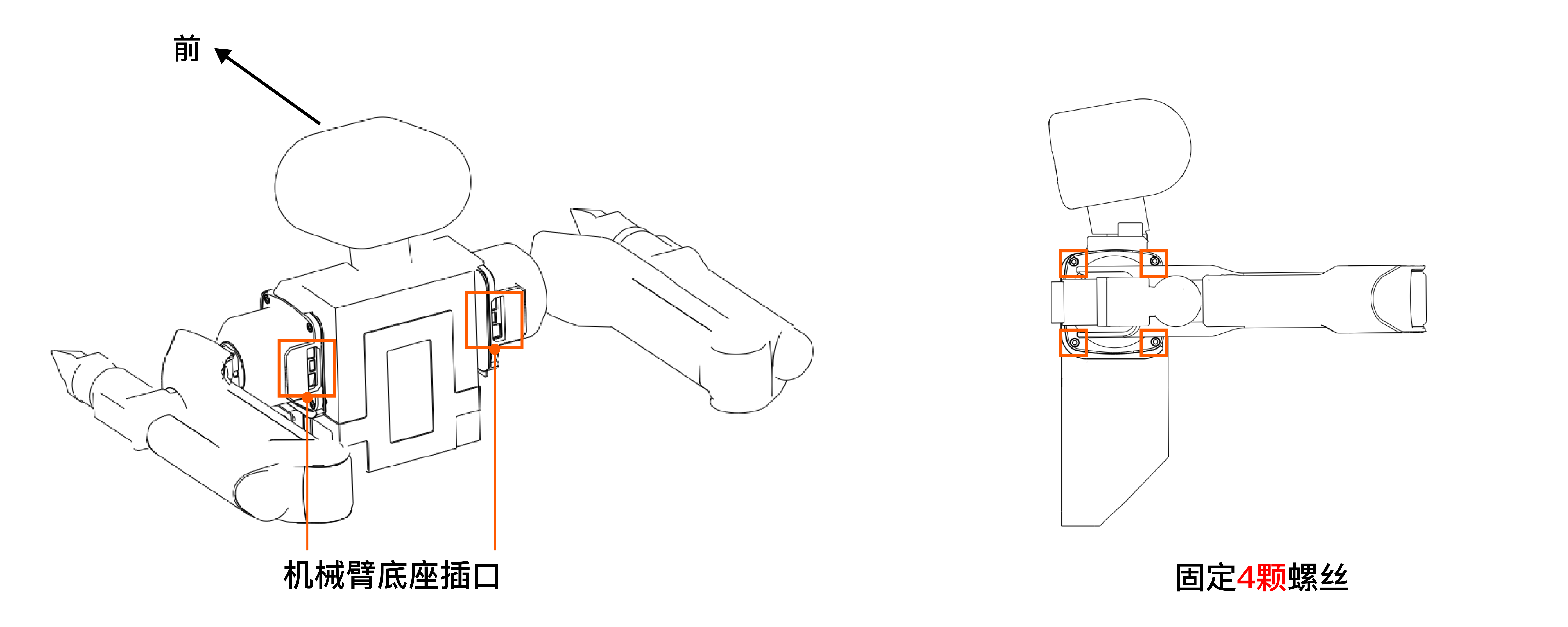
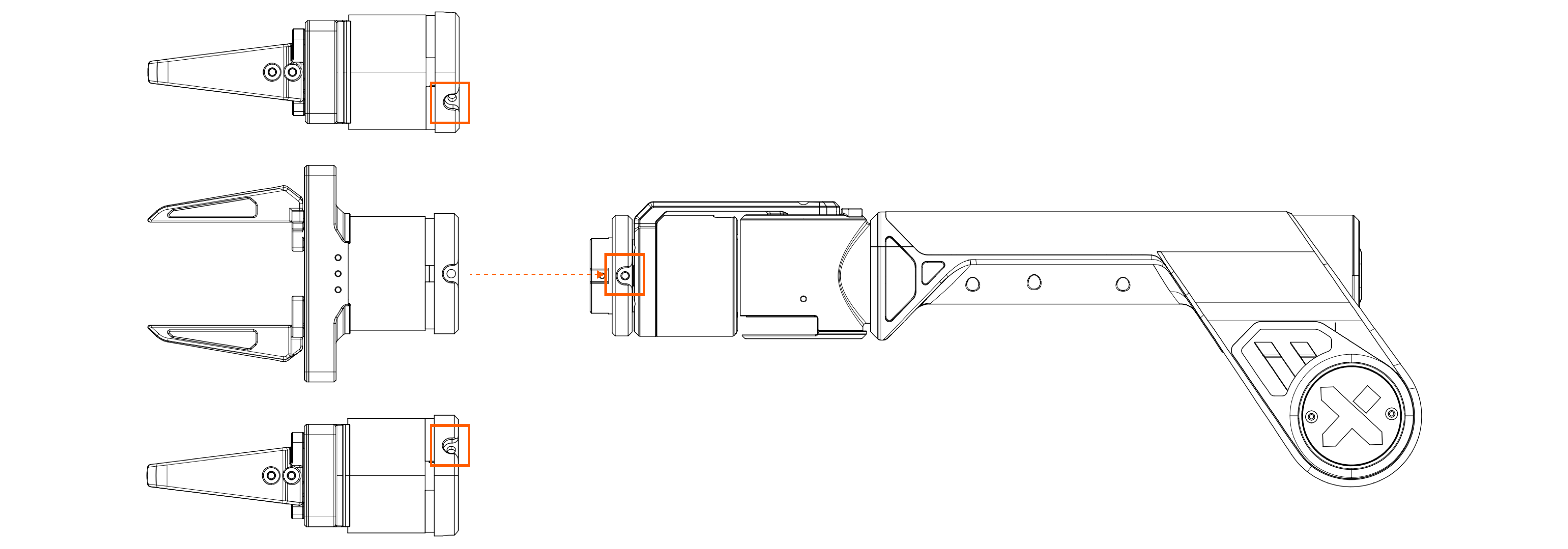
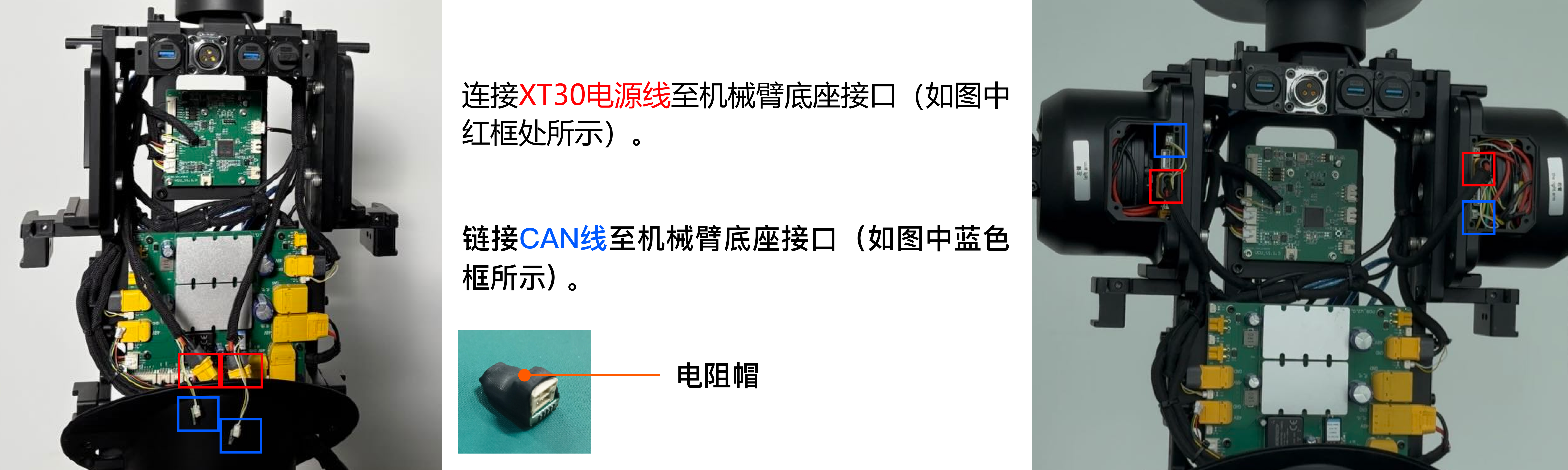
-
将机械臂电源线和CAN线连接到手臂底座端口。 注意:在插入CAN电缆之前,请先卸下电阻帽。如在未安装机械臂的状态下使用机器人,需要重新安装上电阻帽,建议您妥善保存。
-
在确认与机器人手臂的通信连接成功后,通过反向执行上述第2.6节-拆卸背部盖板和第2.7节-拆卸前侧盖板的步骤,重新安装盖板。
6. 第二次自检
在开始自检之前,请确保:
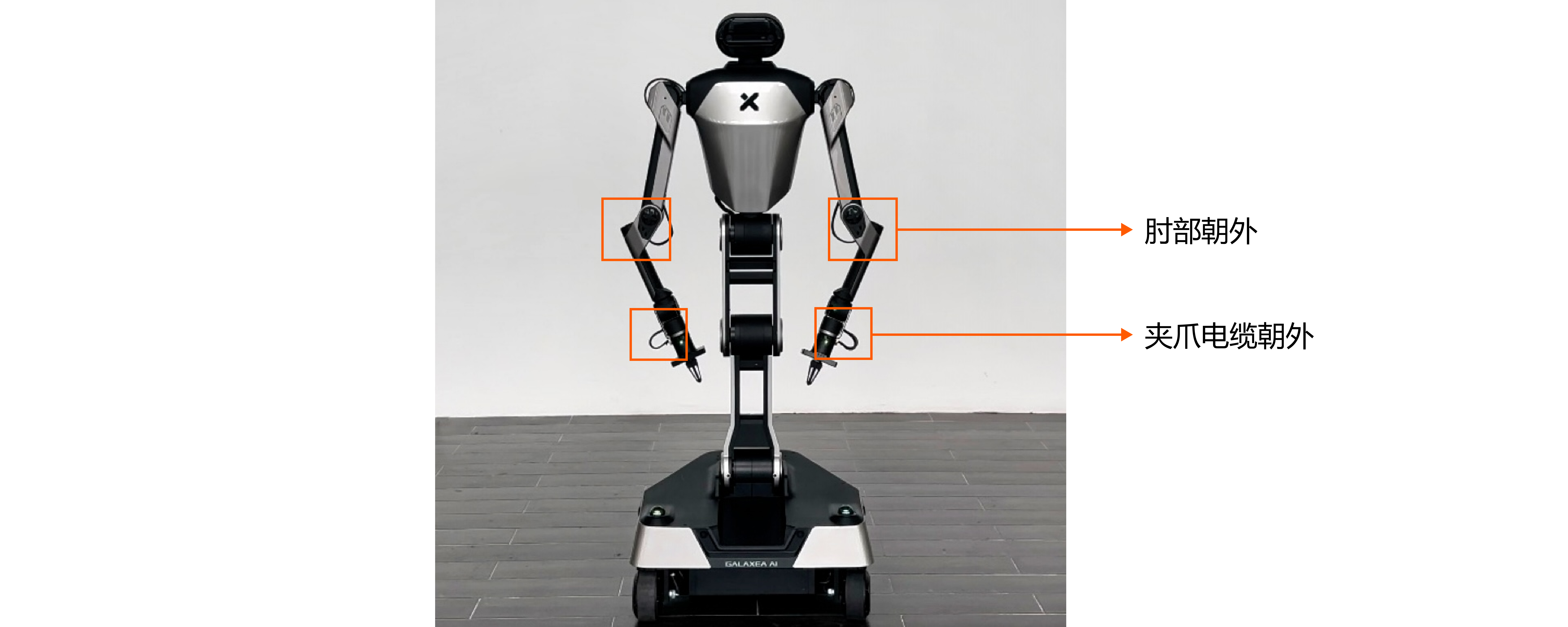
- R1已站立。
- R1已正确安装手臂。肘部朝外(银色外壳朝内,黑色外壳朝外),且夹爪电缆朝外。
然后,开机并:
- 按照第4.3节-启动CAN驱动程序中的命令完成操作。
- 按
Ctrl + B然后按C创建新终端。现在,开始第二次自检。source {your_download_path}/install/setup.bash
rosrun HDAS check_node
# 输入1 (0 表示安装机械臂后的自检;1表示未装机械臂时的自检) - 按照第4.5.1节-启动躯干控制和第4.5.2节-启动底盘控制中的命令完成操作。
7. Demo演示
重要提示:在对R1进行任何操作之前,您必须完成R1自检以确保安全。
完成上述所有操作后,将R1移动到一个开阔区域,确保周围没有障碍物,方可远程命令R1进行Demo测试。
您可以在R1 Demo Guide中找到文档和Python脚本。
8. 传感器标定数据采集
点击查看R1传感器标定数据采集方法。