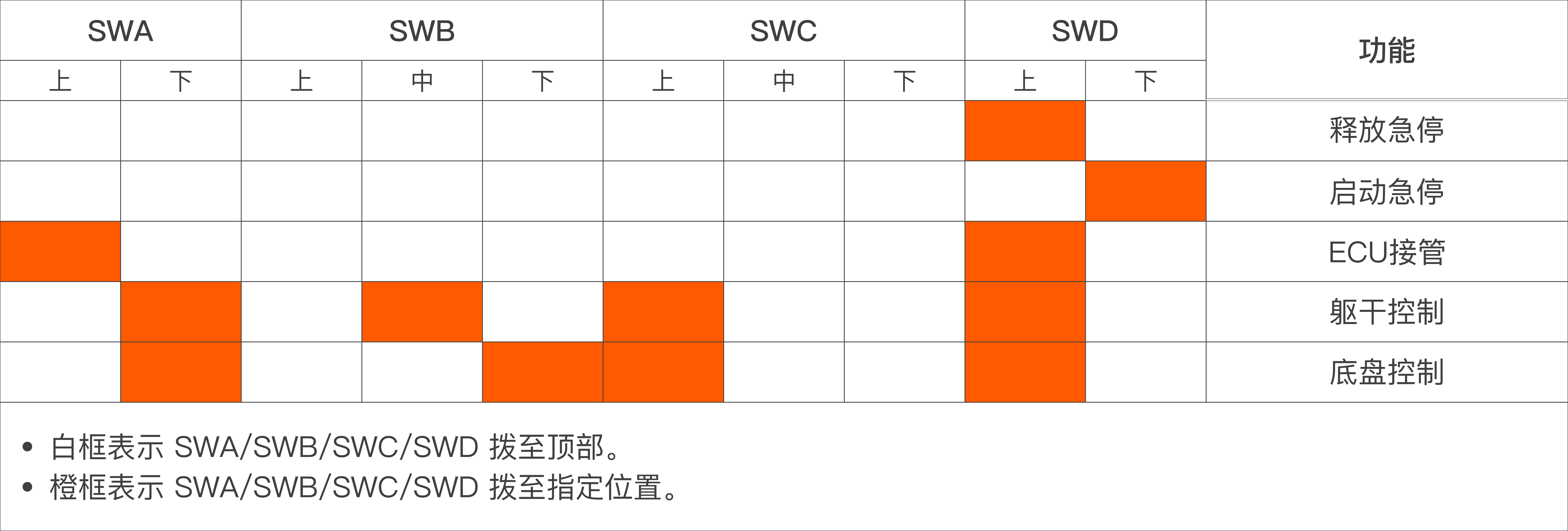
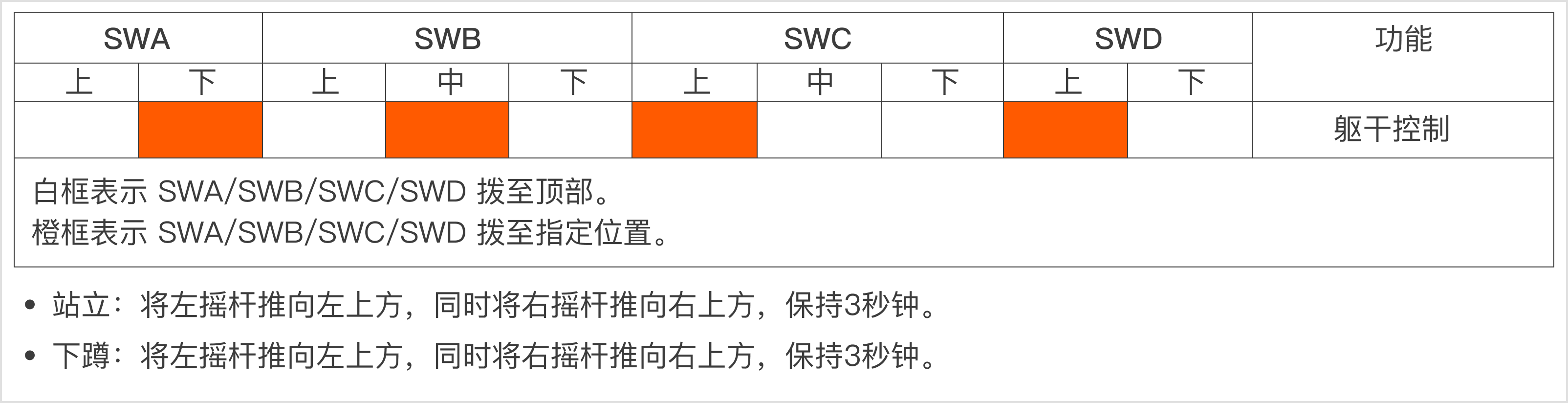
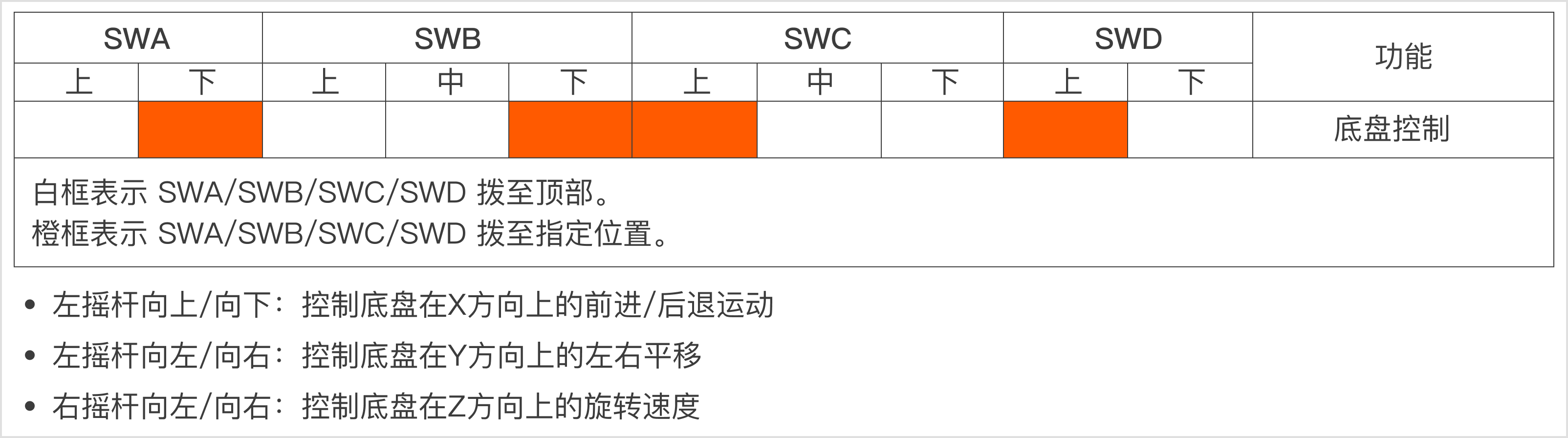
使用说明遥控器使用SDK: VNextOn this page遥控器使用遥控器用于控制机器人的躯干、底盘和紧急停止。 重要提示:在进行任何操作之前,请确认所有拨杆开关(SWA/SWB/SWC/SWD)都拨至最上方档位,这样能使R1 处于停止状态,防止其意外运行。 请按照下图所示,将4个拨杆拨到指定位置控制机器人: 在使用遥控器控制R1 之前,请必须先启动 CAN 驱动程序和其他相关程序,详细说明请参考开箱启动指南中第4.3节。完成启动后,可将每个开关移至指定位置,并按照以下步骤控制R1。 躯干控制 如图所示: 底盘控制