运控接口
关节控制
接口信息如下:
| 话题名称 | I/O | 描述 | 消息类型 |
|---|---|---|---|
| /hdas/feedback_arm | Output | 手臂关节反馈 | hdas_msg::msg::MotorControl |
| /motion_control/control_arm | Input | 手臂电机控制 | hdas_msg::msg::otor_control |
| /motion_target/target_joint_state_arm | Input | 各关节目标位置 | sensor_msgs::msg::JointState |
针对以上话题的具体字段及其详细描述如下表所示:
| 话题名称 | 字段 | 描述 |
|---|---|---|
| /motion_target/target_joint_state_arm | position | 这是一个包含六个元素的向量,代表每个关节的六个目标位置。 |
| velocity | 这是一个包含六个元素的向量,代表每个关节在运动过程中的最大速度。最大速度如下:{3, 3, 3, 5, 5, 5, 5}。 加速度和加加速度限制设置为速度限制的1.5倍。 | |
| /hdas/feedback_arm | - | 请参考手臂驱动接口 |
| /motion_control/control_arm | - | 请参考手臂驱动接口 |
手臂姿态控制
-
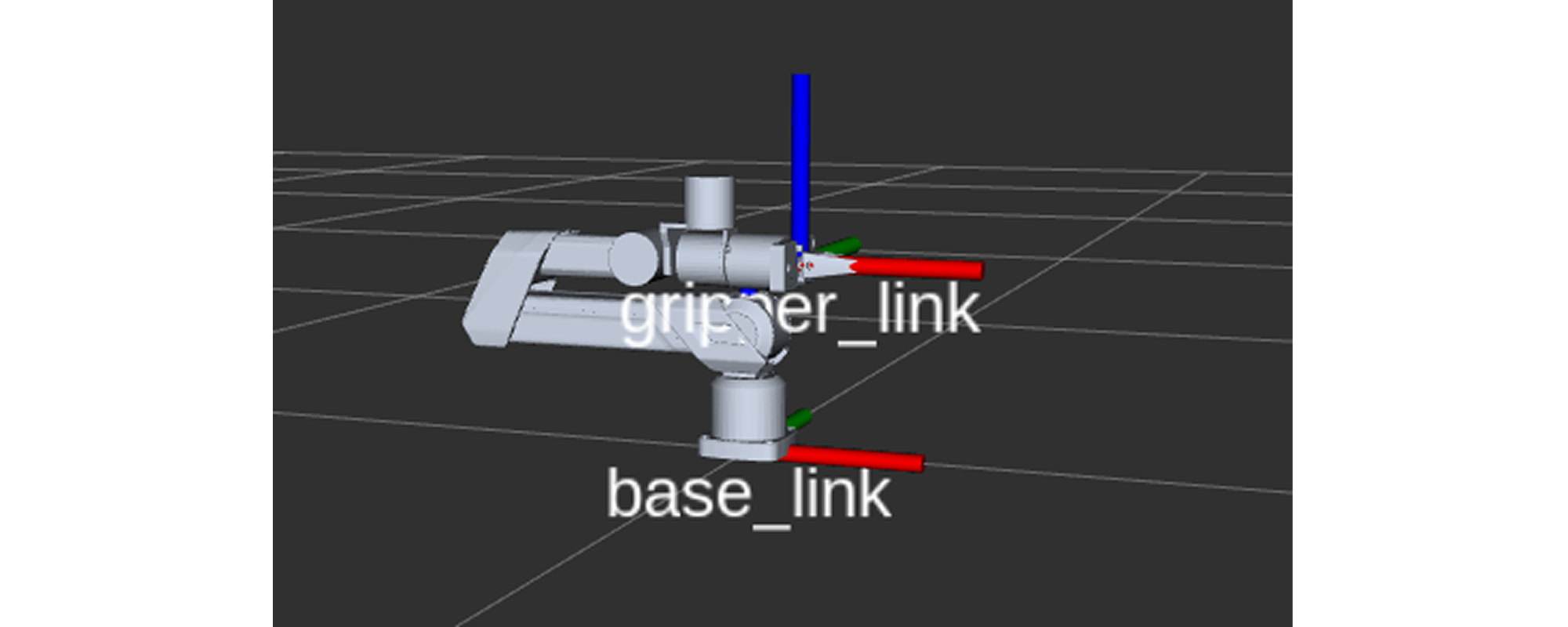
当前末端姿态控制的相对位姿是URDF中gripper_link相对于base_link的姿态转换。以A1X为例,下图展示了gripper_link坐标系相对于base_link坐标系的相对关系,包含了x、y、z的偏移量以及orientation对应的旋转偏移。
该接口如下所示:
| 话题名称 | I/O | 描述 | 消息类型 |
|---|---|---|---|
| /hdas/pose_ee_arm | Output | 末端实际位姿 | geometry_msgs::msg::PoseStamped |
| /hdas/feedback_arm | Output | 手臂关节反馈 | hdas_msg::msg::MotorControl |
| /motion_target/target_joint_state_arm | Input | 手臂关节目标 | sensor_msgs::msg::JointState |
| /motion_control/pose_ee_arm | Input | 目标手臂末端执行器姿态 | geometry_msgs::PoseStamped |
针对以上话题的具体字段及其详细描述如下表所示:
| 话题名称 | 字段 | 描述 |
|---|---|---|
| /motion_target/target_pose_arm | header | 标准消息头 |
| pose.position.x | X轴偏移 | |
| pose.position.y | Y轴偏移 | |
| pose.position.z | Z轴偏移 | |
| pose.orientation.x | 旋转四元数 | |
| pose.orientation.y | 旋转四元数 | |
| pose.orientation.z | 旋转四元数 | |
| pose.orientation.w | 旋转四元数 | |
| /hdas/feedback_arm | - | 请参考手臂驱动接口 |
| /motion_target/target_joint_state_arm | - | 请参考关节控制接口 |
夹爪控制
接口信息如下:
| 话题名称 | I/O | 描述 | 消息类型 |
|---|---|---|---|
| /motion_target/target_position_gripper | Input | 夹爪目标位置 | sensor_msgs::msg::JointState |
| hdas_msg/msg/MotorControl | Input | 夹爪电机控制 | sensor_msgs::msg::JointState |
针对以上话题的具体字段及其详细描述如下表所示:
| 话题名称 | 字段 | 描述 |
|---|---|---|
| /motion_target/target_position_gripper | position | 表示夹爪的目标位置,[0,100],0为完全闭合,100为完全张开。 |
| hdas_msg/msg/MotorControl | - | 请参考驱动接口 |