Demo演示
使用前准备
在执行Demo演示前,请确保:
- R1 Pro的双臂已准确安装完毕,此时手臂姿态应为肘关节连接处(黑色橡胶朝正前方);夹爪垂直朝下指向地面,且夹爪电缆朝外。
- R1 Pro的躯干保持站立姿态。
- 以R1 Pro为中心,方圆 1.5 米范围内不得有人员以及障碍物存在。
- 必须完成自检,详情可查看 R1 Pro 开箱启动指南。

脚本执行
注意:请严格按照顺序进行演示,如出现任何错误,请及时按下
Ctrl + C关闭程序,并联系我们提供技术支持。
按下 Ctrl + B 然后按 C 创建新终端,执行 Demo 脚本 r1pro_test_open_box.py 。
source {your_download_path}/install/setup.bash
cd {your_download_path}/install/moca_adapter/share/moca_adapter/scripts/robot_openbox/r1pro/
python3 r1pro_test_open_box.py
请输入 1 :(表示已安装机械臂)

按顺序依次输入数字 1~7,并按 Enter回车键,机器人将开始执行 Demo 的分段动作。
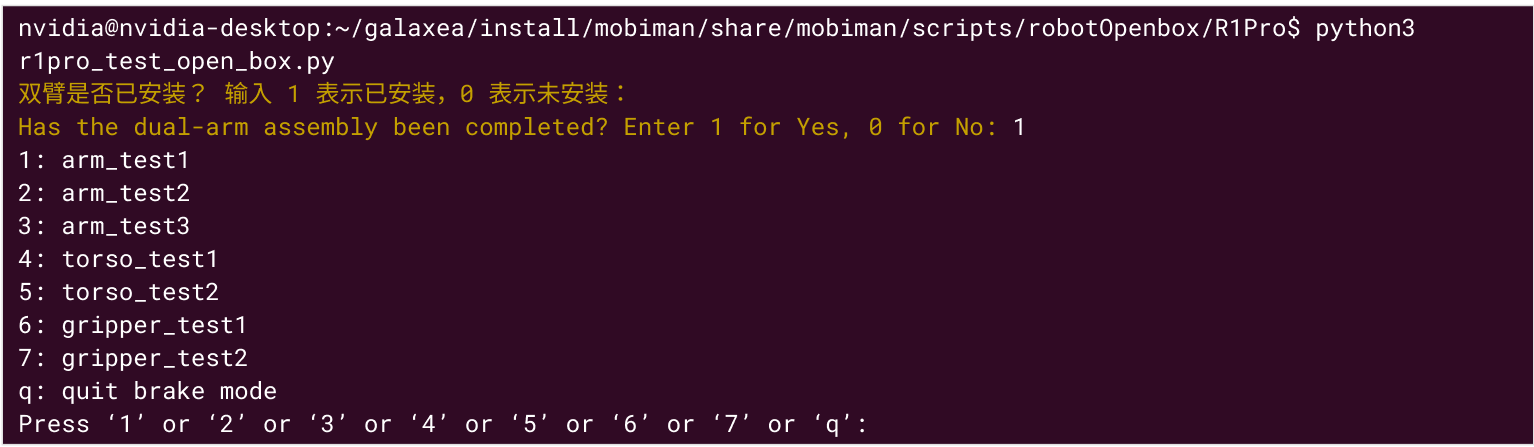
当完成所有动作后,按 q 退出,机器人将回到初始姿态。