VR 遥操作
使用提示与免责声明
本站发布的遥操作功能,其性能与功能以本公司公开发布的技术规格及功能说明为准.在实际使用过程中,如因以下情形产生故障、异常或造成损失(包括直接或间接损失),本公司不承担责任:
- 未按照操作手册或教程正确部署运行环境、网络配置或使用设备;
- 擅自修改代码、集成不兼容组件,或以超出功能设计范围的方式使用遥操作功能;
- 网络中断、电力故障、第三方硬件失控等非本公司可控因素;
- 由于行业技术特性目前尚无法完全避免的时延、抖动或数据丢包等现象。 下载遥操作SDK并使用本功能,即视为您已阅读并同意上述内容。
1. 启动前准备
1.1 硬件准备
| 物品 | 数量 | 备注 |
|---|---|---|
| Meta Quest 3 VR设备 | 1 | 包含1个头戴设备、2个手持遥控器和Type-C连接线。 |
| R1 Lite Base | 1 | 机器人本体。 |
| R1 Lite 遥控器 | 1 | 控制R1 Lite机器人 |
| R1 Lite 上位机(双系统,非虚拟机) | 1 | Ubuntu 22.04 ROS 2 Humble |
| 局域网 | 1 | 用于连接VR设备和R1 Lite Base。 |
1.2 软件准备
查看R1 Lite软件版本更新日志,获取最新的SDK版本。整机ATC SDK版本中包含所有产品软件资源。
同时,下载VR设备配置SDK:
-
百度云:https://pan.baidu.com/s/1SCpvwFIjvAV7EtchW-cssA?pwd=vrvr
-
Meta 相关安装包.zip:用于新设备激活。
-
platform-tools-latest-windows.zip:adb文件,用于安装VR头显内部的数据采集APP。
-
vr_teleop-0.1.7-20250818.apk:VR头显内部的数据采集APP。
2. VR 设备配置
如您的VR设备由星海图配套提供,可以跳过第2.1节~第2.5节,直接查看第2.6节。
2.1 VR设备开发者模式激活
请参考 Meta Quest 3 开发者模式使用说明 完成激活。
2.2 VR设备SDK安装 (需要使用 windows 系统电脑)
- 解压ADB文件:下载并解压
platform-tools-latest-windows.zip文件。 - 连接VR设备:使用Type-C数据线将VR设备连接到电脑。
- 如已安装过旧版apk,请先删除。
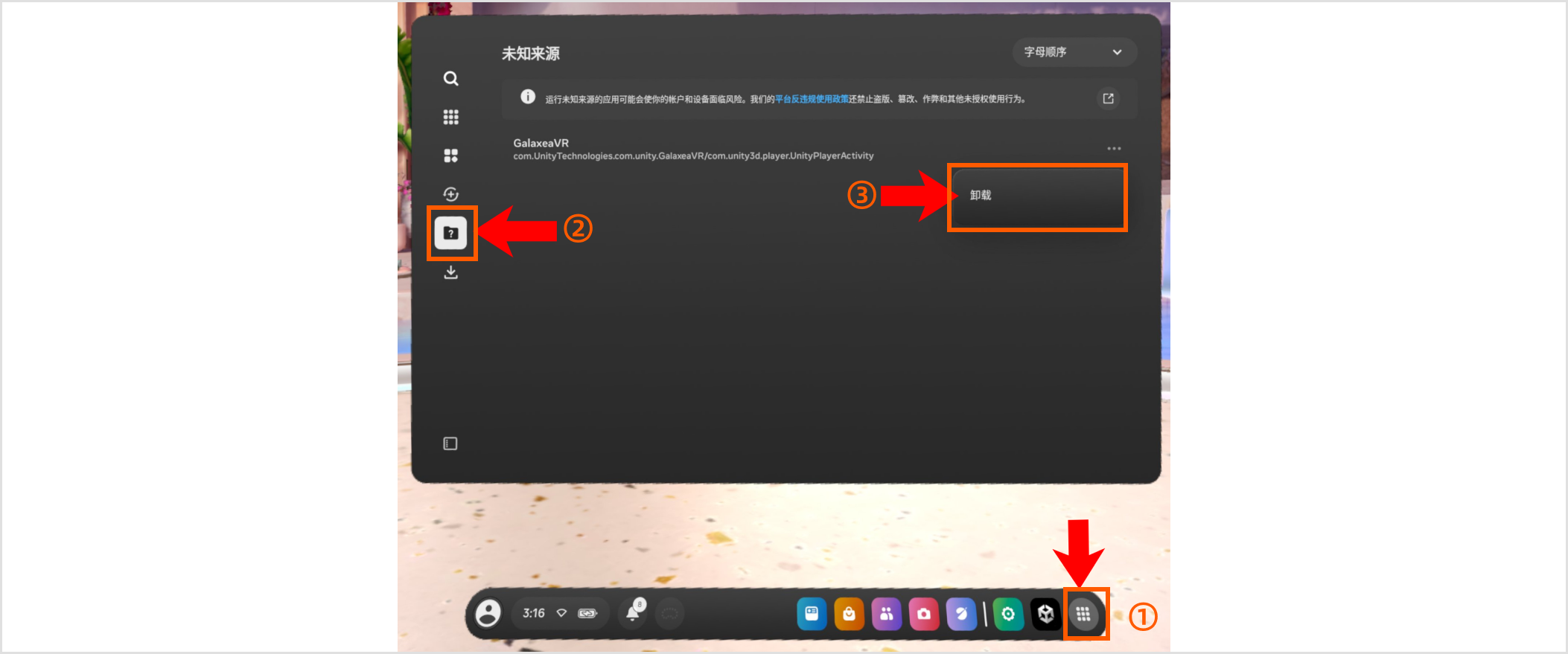
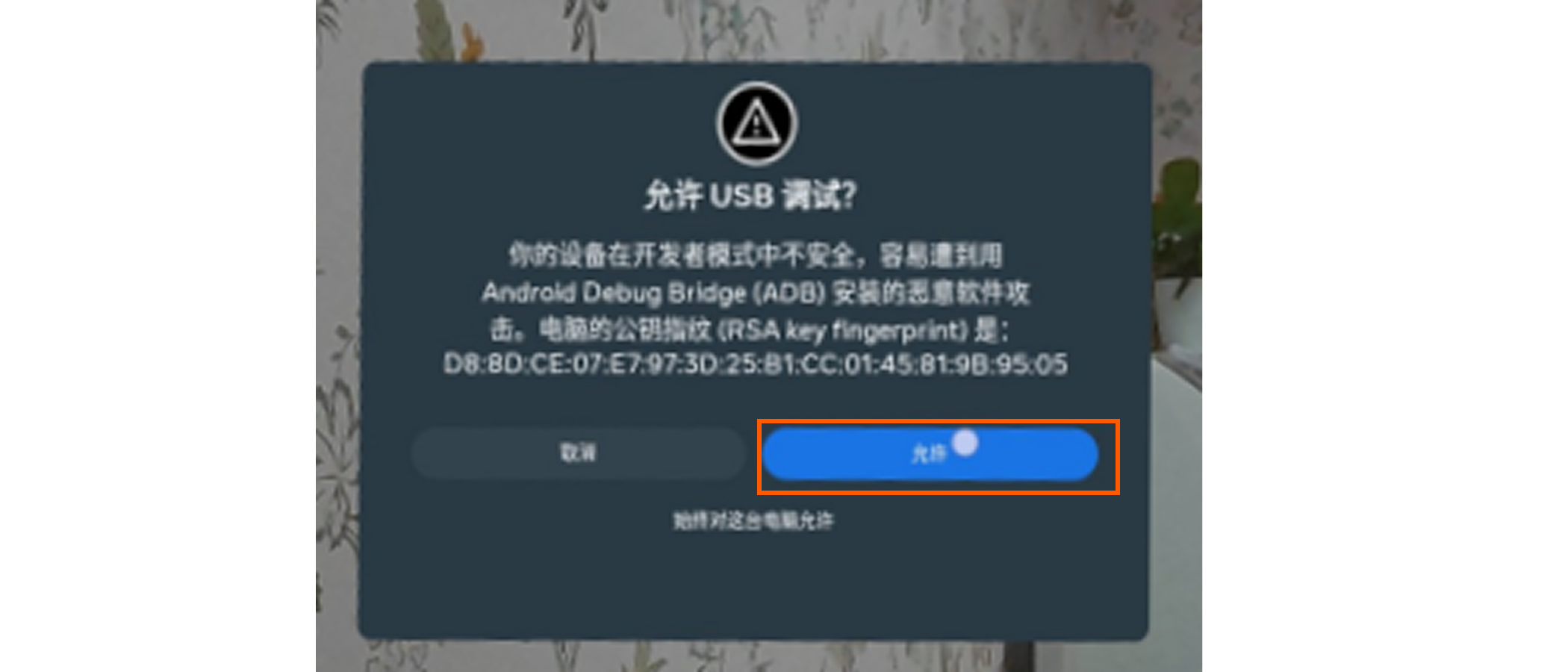
- 授权USB连接:在VR设备中,确认并允许USB设备连接(如图所示)。
- 进入ADB解压路径:打开文件资源管理器,进入解压后的ADB工具文件夹路径。
- 拷贝APK文件:将
vr_teleop-0.1.7-20250818.apk文件拷贝到该路径下。 - 安装APK:在该路径下打开命令提示符(CMD),执行以下命令安装应用:
如果命令执行后显示 Success,则表示安装成功。
.\adb.exe install vr_teleop-0.1.7-20250818.apk
2.3 VR 设备配置
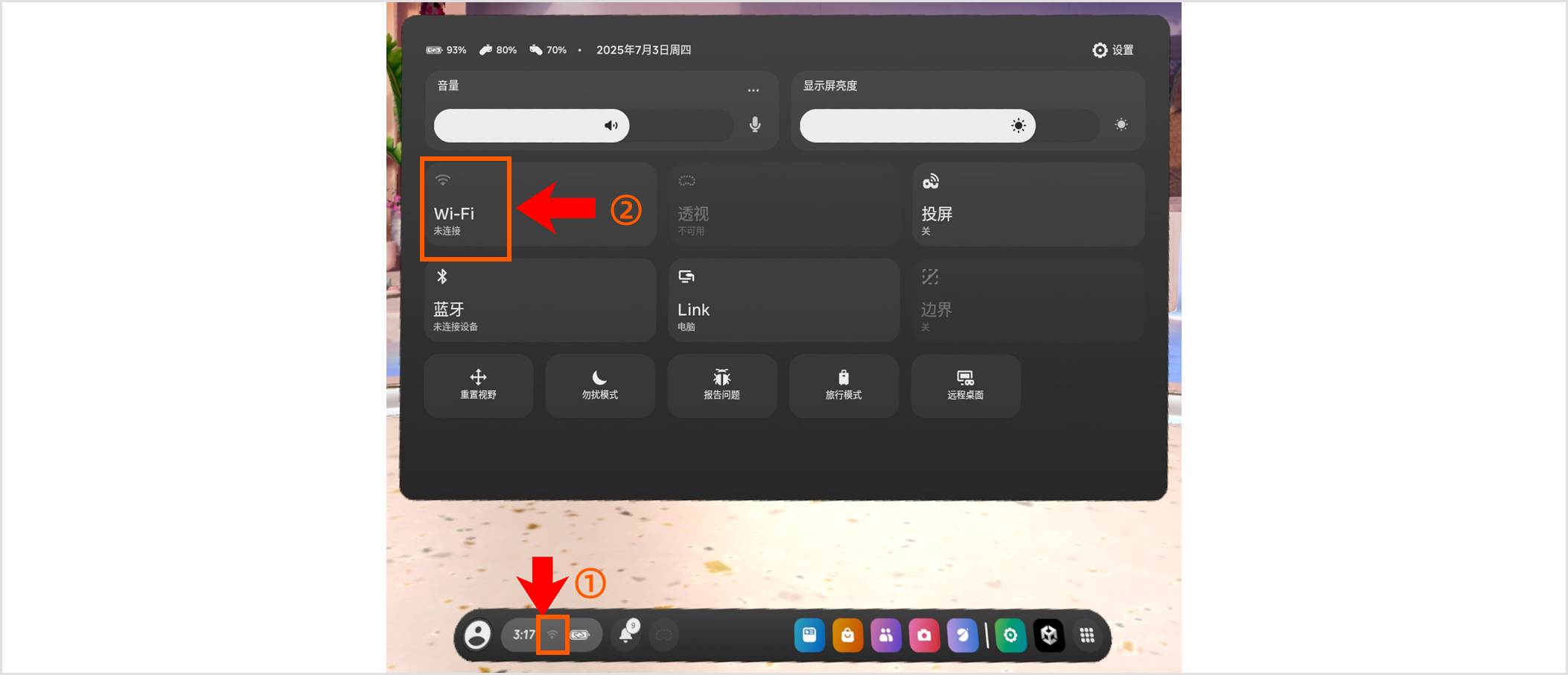
在 Meta Quest 3 的初始界面下,连接与R1 Lite 相同的WiFi网络。
注意:提示网络受限是正常现象,因为该网络无法访问外网。
2.4 关闭 Quest 边界系统
- 打开 设置 > 高级 > 开发者。
- 关闭 实际空间功能。

注意:
- 关闭后,系统不再提示设置边界,采集过程中即使位移或离开原地,也不会打断流程。
- 主菜单页面将无法启用透视视图(Passthrough)。
- 关闭边界后请务必确保操作环境安全,避免发生碰撞风险。
2.5 避免系统休眠
- 打开菜单 → 设置(Settings)
- 点击 常规 > 电源 > 显示屏已关闭
- 将息屏时间设置为 4 小时
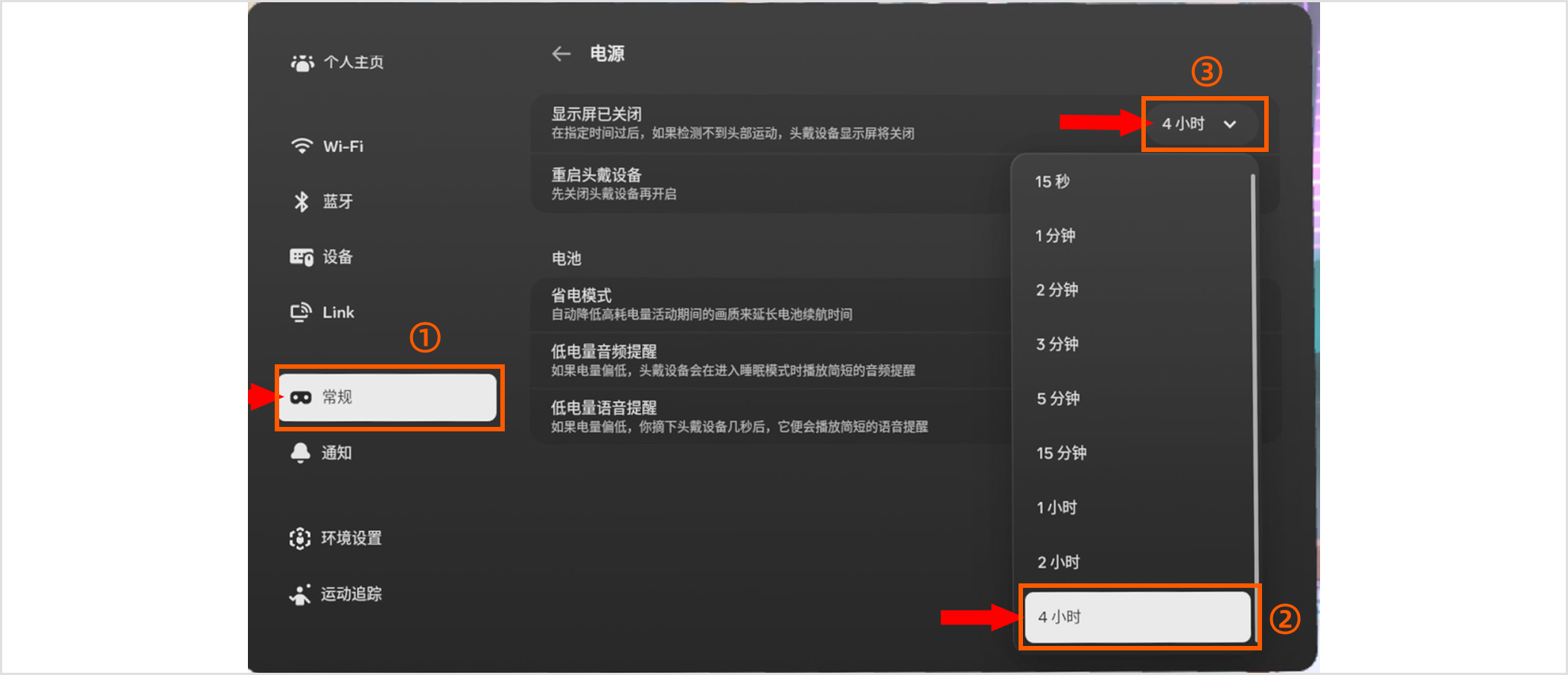
注意:关闭系统休眠是为了实现「可摘下佩戴」方案,使用结束后请手动点击关闭Meta Quest3S 电源,避免电量耗尽。
注意:请尽量维持 VR 头显设备和手柄的电量在充足的状态,低电量会影响 VR 手柄位姿发送的帧率,造成遥操卡顿。
2.6 获取VR设备的IP地址
在VR设备内,点击已连接的WiFi,打开网络页面后向下划找到并记录IP地址,如192.168.5.24。后文以 ${VR_IP} 指代。
2.7 数据采集时佩戴方式
为避免长时间佩戴头显带来的不适,我们提供「可摘下佩戴」方案。
在使用前,请先完成「避免系统休眠」和「关闭边界系统」设置(最新发售机器已预先配置,如未配置请参考上文说明)。
- 移除头显顶部固定条带(Top Strap)与头显顶部的连接,并摘下面部支撑连接件(Facial Interface),以方便后续挂在颈部灵活调整。
- 将头显挂于颈部,调整至正面朝前,显示面垂直于地面(如图所示)。

此挂载方式可确保手柄始终处于头显摄像头的可视角范围内(约 100° 水平视场角),避免操作中超出追踪范围。该佩戴方式不仅保证手柄追踪稳定,还能让长时间的数据采集操作更舒适和轻松。
⚠️ 注意:请在安全、开阔的环境中使用,确保操作时不会发生碰撞。
3. R1 Lite 配置
如您不需要升级机器人的软件版本,请跳过本章节内容。
-
下载并拷贝SDK文件(例如:
{r1lite_vr_teleop_sdk_name}.tar.gz),执行以下命令拷贝SDK到 R1 Lite 上。scp {r1lite_vr_teleop_sdk_name}.tar.gz r1lite@${R1_Lite_IP}:/home/r1lite/Downloads -
登陆 R1 Lite
ssh r1lite@${R1_Lite_IP} -
解压SDK到 R1 Lite
mkdir /home/r1lite/galaxea
tar -zxvf /home/r1lite/Downloads/{r1lite_vr_teleop_sdk_name}.tar.gz -C /home/r1lite/galaxea -
安装额外依赖
sudo apt install ros-humble-rosbag2-storage-mcap
pip3 install websockets pyquaternion tos -
配置设备序列号及设备名称
# 获取 r1lite 序列号 (发货清单查询,如找不到可以联系星海图客服)
# 如:S2RL100P25110
sudo mkdir -p /opt/galaxea
sudo chown -R r1lite:r1lite /opt/galaxea
mkdir -p /opt/galaxea/body
echo "S2RL100P25110" | tee /opt/galaxea/body/RSN > /dev/null
echo "S2RL100P25110" | tee /opt/galaxea/body/RSN_REAL > /dev/null
echo "R1LITE" | tee /opt/galaxea/body/ROBOT_NAME > /dev/null
# 检验是否写入成功
cat /opt/galaxea/body/RSN
cat /opt/galaxea/body/RSN_REAL
cat /opt/galaxea/body/ROBOT_NAME -
配置数据采集模块
数据录制和可视化平台 EDP平台免费试用 - 请在完成后查看First Data - EDP 入门手册。
升级完成后,将 R1 Lite 关机并重新启动。重启后,软件包配置即完成,VR遥操作功能即可使用。
升级完成后,将机器人下电并重新启动。重启后,软件包配置完成,VR遥操作功能即可使用。
4. 遥操作启动
注意:每次启动时都需要完成并确认本章节的所有操作。
4.1 R1 Lite 本体程序启动
-
登录R1 Lite
ssh r1lite@${R1_Lite_IP} -
进入软件包启动目录
cd /home/r1lite/galaxea/install/startup_config/share/startup_config/script/ -
启动程序
./robot_startup.sh boot
../sessions.d/ATCStandard/R1LITEVRTeleop.d/
4.2 VR设备程序启动
注意:请佩戴好VR设备并手持两个遥控器,开始以下操作。
4.2.1. 连接WiFi
确认VR设备已成功连接到与 R1 Lite 本体相同的WiFi网络。
4.2.2. 启动GalaxeaVR APP
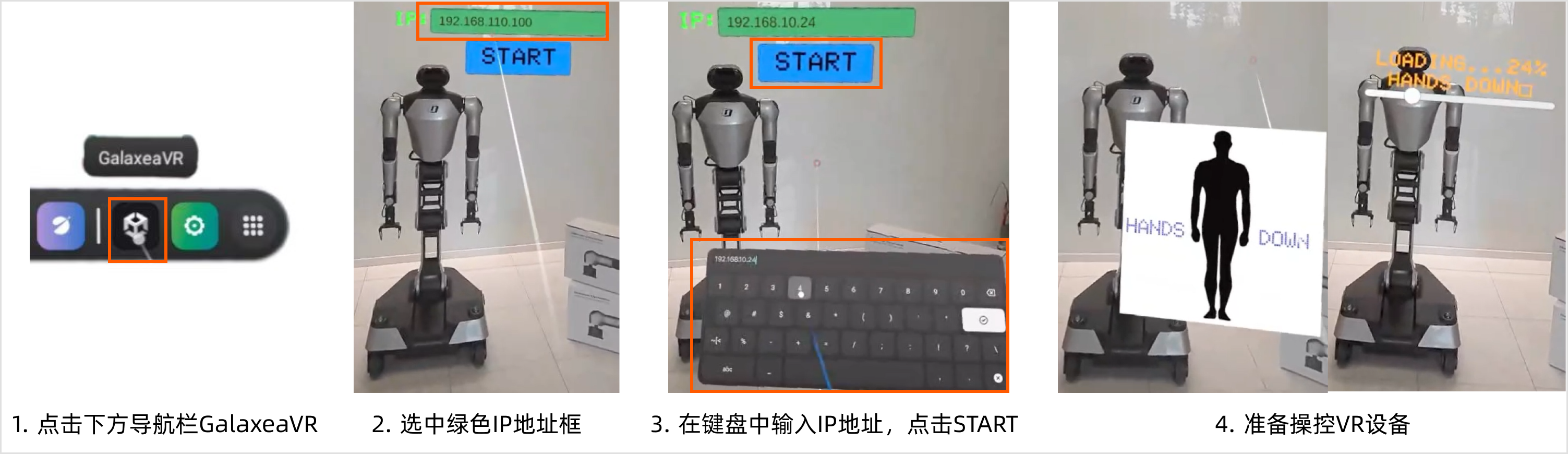 (图中为R1 Pro机器人作为示例)
(图中为R1 Pro机器人作为示例)
-
打开GalaxeaVR应用:
点击右下角的正方体图标启动GalaxeaVR应用。
-
输入R1 Lite的IP地址:
进入GalaxeaVR应用后,将VR手柄发射的射线对准绿色的IP输入框。
等待绿色输入框轻微变色后,用右控制器的T键(食指键)点击输入框(光标位置需要偏下一些)。
键盘弹出后,输入机器人端的IP地址(即 R1 Lite的IP地址)。
设置好IP后:点击Start按钮开始(或者长按右控制器B键),如您开启VR头显设备的音量,可以听到正在连接中 的提示音,以及连接成功的提示音,如未听到连接成功的提示音,请检查前序步骤是否执行有误。
-
操控VR设备:
此时VR默认操作模式为复位模式,请参考 5.3 章节切换到双臂操控模式后,短按左右遥控器 G 键解除暂停进行双臂遥操。
注意:此时机器人会同步您的操作,请注意安全,先进行小幅移动,确保周围没有障碍物。
使用以下步骤完成遥控器简易操作:
- 停止操作:长按右遥控器 B 键 2 秒以上,停止VR遥操作。(注意:停止后再次进入遥操作,需要退出 GalaxeaVR应用 并重新进入。
- 控制夹爪:手的移动会控制机器人手臂的移动。左遥控器的 T 键和右遥控器的 T 键分别控制左右手的夹爪闭合。
- 暂停右臂:短按右遥控器 G 键一下,右臂会停在当前的位置;再按一下 G 键解除暂停。
- 暂停左臂:短按左遥控器 G 键一下,左臂会停在当前的位置;再按一下 G 键解除暂停。
详细操作说明请参考第6章节:遥操作控制说明。
5. 遥操作控制说明
请在确保人员与物品安全的情况下,于开阔场地练习本产品的使用。
建议待熟悉本产品的使用后,再开始正式数据采集。
5.1 遥控器使用说明
5.1.1 R1 Lite 航空遥控器
遥控器使用说明如下:
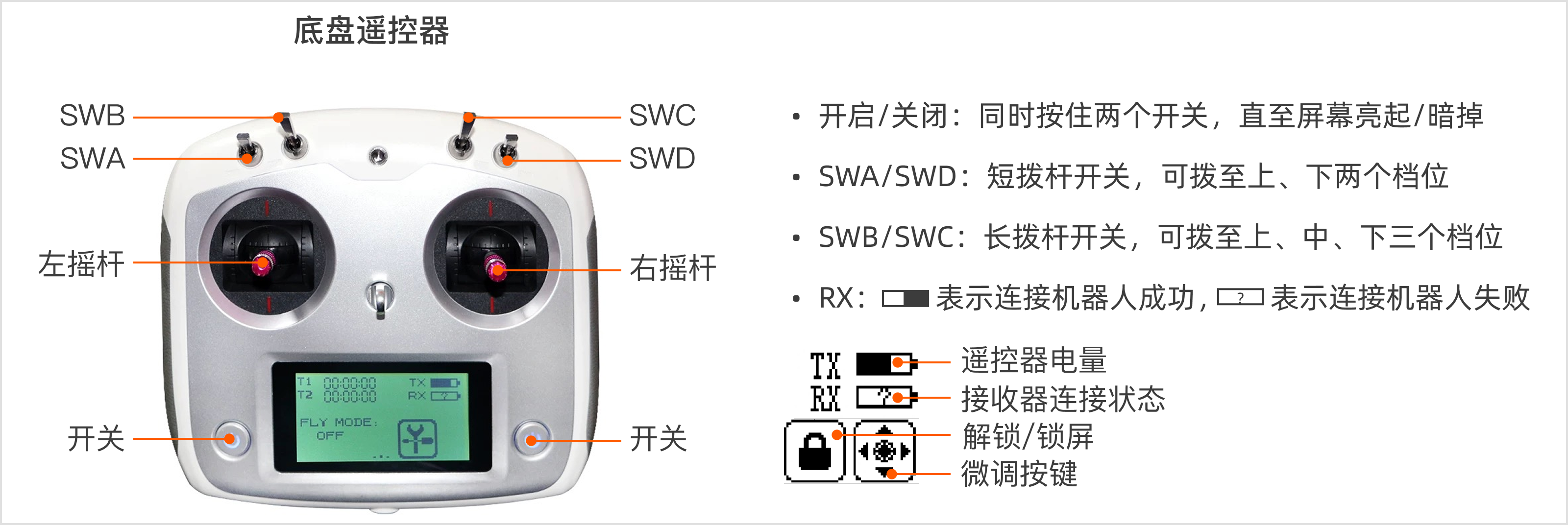
注意:在进行任何操作之前,请确认所有拨杆开关(SWA/SWB/SWC/SWD)都拨至最上方档位,这样能使 R1 Lite 处于停止状态,防止其意外运行。
在不同功能下,各拨杆开关切换到不同位置的操作说明如下:

- 上位机控制底盘(下下上上):在该模式下,上位机须先启动底盘运控程序,才可开启控制。
- 遥控器控制底盘(下下中上):机器人上电后,即可在该模式下直接使用遥控器控制底盘运动,上位机无须操作。
- 开启急停功能(D下):在任何模式下,均可将SWD拨至下方开启急停;但开启急停后,须重启机器人。
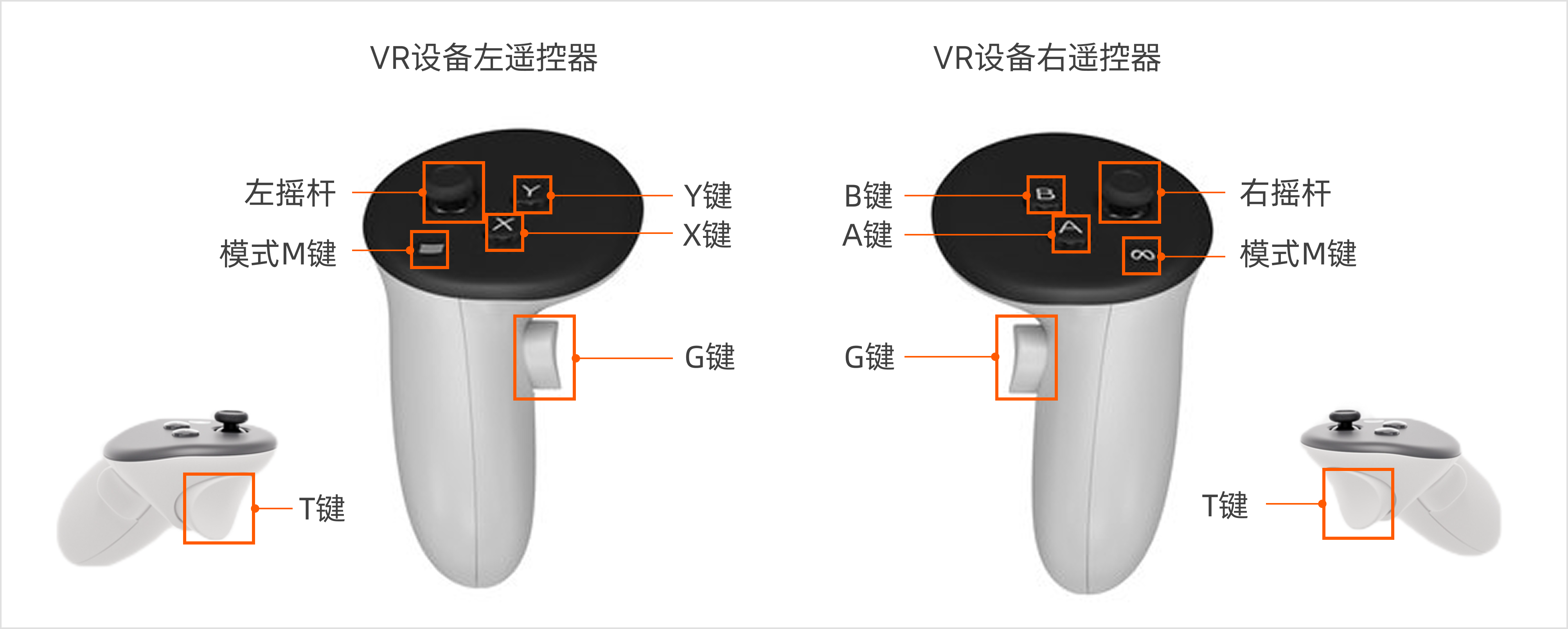
5.1.2 VR手持遥控器
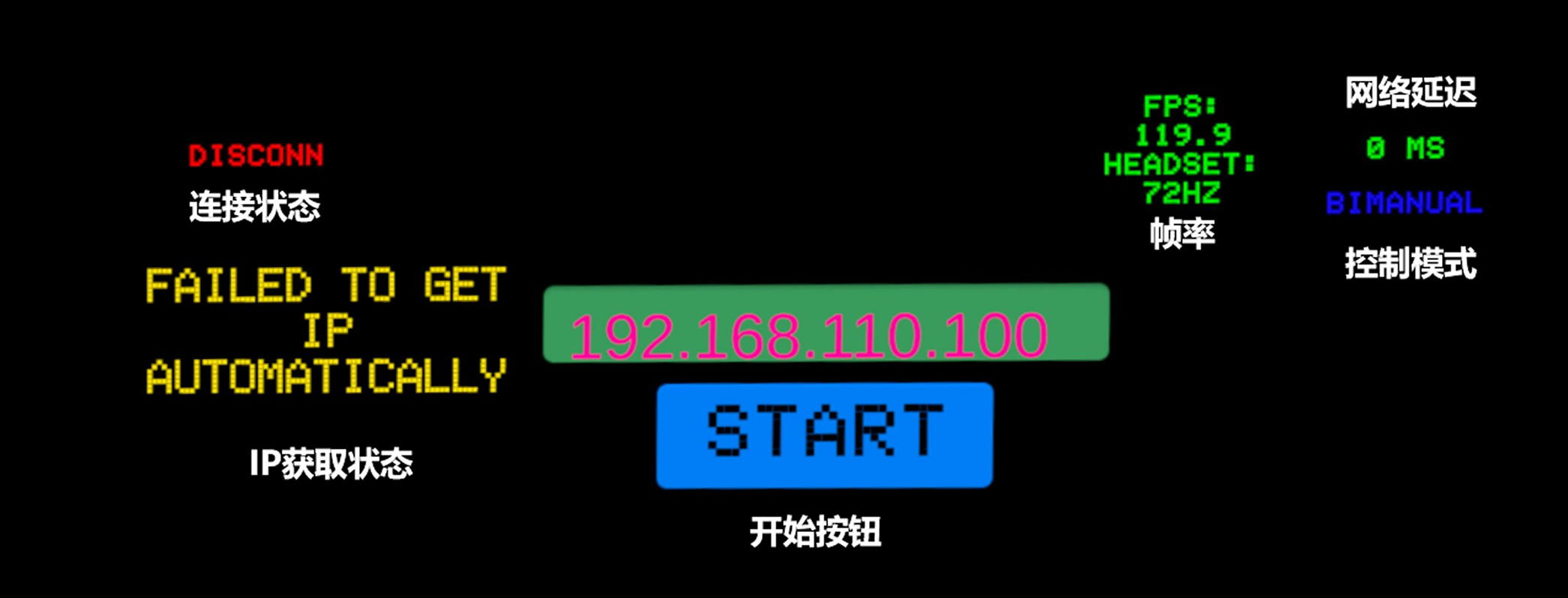
5.2 VR设备APP显示按键
5.3 模式切换
遥操作启动后,默认模式为复位模式。用户可以通过VR设备遥控器切换不同的操作模式。
注意: 若您发现由于多次使用遥控器G键进行暂停和解除暂停后,机械臂的遥操作姿态略有异常时,请不要担心,这是遥操作增量控制的机制引起的,您可以通过复位模式对机械臂进行复位,从而更好地操控机器人。
| 模式 | 切换方式 | 备注 |
|---|---|---|
| 复位模式 (Reset) |
左摇杆向下长按1秒 | 默认模式 |
| 双臂操控模式 (BIMANUAL) |
左右两个摇杆同时向下长按1秒 | 如需控制底盘,需要开启 R1 Lite 遥控器,并将 SWA,SWB,SWC,SWD全部拨至上方。 |
| 躯干模式 (Torso) |
右摇杆向下长按1秒 |
5.3.1 复位模式
| 功能 | 描述 | 备注 |
|---|---|---|
| 复位双臂到初始位置 | VR左遥控器 T + G 键 VR右遥控器 T + G 键 四个按键一起按下,会 reset 机器人双臂位置到初始启动位置 |
- |
5.3.2 双臂操控模式
| 功能 | 描述 | 备注 |
|---|---|---|
| 双手跟随 | R1 Lite 机械臂末端位置会跟随VR手持遥控器的移动而移动。 | - |
| 夹爪夹取 | VR右遥控器的 T 键控制右夹爪开合 VR左遥控器的 T 键控制左夹爪开合 |
- |
| 手臂暂停 | VR右遥控器的 G 键控制右臂的暂停 VR左遥控器的 G 键控制左臂的暂停 按一下暂停,再按一下解除暂停 |
- |
| 底盘前进/后退 | VR左遥控器摇杆向前/向后 | - |
| 底盘平移 | VR左遥控器摇杆向左/向右 | - |
| 底盘自旋 | VR右遥控器摇杆向左/向右 | - |
5.3.3 躯干模式
| 功能 | 描述 | 备注 |
|---|---|---|
| 腰部前后俯仰(关节2) | VR左遥控器摇杆向前/向后 | |
| 躯干上下升降(关节3) | VR右遥控器摇杆向前/向后 | |
| 躯干前后俯仰(关节4) | VR右遥控器 T/G 键 |
# 修改如下来改变夹爪的量程,请修改launch文件内的关节位置
vim /home/r1lite/galaxea/install/teleoperation_ros2/share/teleoperation_ros2/launch/vr_teleoperation.launch.py
'gripper_openning_threshold', default value='80.0' #最大值:100.0
'gripper_closing_threshold', default value='0.0' #最小值:0.0
6. 数据采集流程
数据录制和可视化平台 EDP平台免费试用 - 请在完成后查看First Data - EDP 入门手册。
6.1 数据格式介绍
数据采集的文件格式为mcap,文件后缀为*.mcap。
6.2 数据获取
默认存储路径:/home/r1lite/GalaxeaDataset/{data}/
date 为当天日期,格式如下:20250307
6.3 数据录制配置文件介绍
默认数据录制使用的配置文件位于:
/opt/galaxea/data_collection/data_task_config.json
配置文件说明:配置文件用于描述此次采集任务的信息,用户可以根据需��求自行修改。
{
"project_info": {
"project_name": "sop_test"
},
"task_info": {
"task_name": "sop_test_data_collection",
"task_owner": "hengyi.fei"
},
"operation_info": {
"teleoperation_type": "VR",
"location": "suzhou",
"operator_name": "jiahao.wu"
}
}
6.4 数据落盘文件介绍
数据以 文件夹 + json 格式保存,文件一一对应。例如:
# 例如以下一个文件夹和一个json文件代表了一个数据包
# 文件夹里包含了 .mcap 数据文件和 meta 信息
S2R12000P18245_20240213173320125_RAW
S2R12000P18245_20240213173320125_RAW.json
# 格式为 robot_serial_number+timestamp+RAW
# robot_serial_number:机器人序列号,位于 /opt/galaxea/body/RSN
# timestamp:数据采集的时间戳精确到毫秒。
# RAW:代表数据采集原始落盘数据
6.5 开启录制
通过VR左遥控器进行数据录制操作:
| 功能 | 操作 | 描述 |
|---|---|---|
| 开启录制 | 左手柄 X 键点击一下 | 开始数据录制 |
| 停止录制 | 左手柄 Y 键点击一下 | 停止数据录制 |
| 删除当前录制 | 左手柄 X 键点击一下 | 已经有录制在进行中,再点击一下X键,则结束并删除当前录制,不会落盘。 |
6.6 录制提示音
您可以通过在 ~/.bashrc 文件中配置 ${VR_IP} 来启用VR头显设备播放数据录制启动和结束的状态提示音这一功能。
# 打开 ~/.bashrc
vim ~/.bashrc
# 在 ~/.bashrc 中添加如下内容,替换 ${VR_IP} 为您的 VR 设备在局域网中的地址 (2.6 章节)
export VR_IP=${VR_IP}
# 重启程序
tmux kill-server
7. 全身遥操模式
注意:如需使用全身遥操作,请更新SDK至V2.3.0版本或以上,且VR头显配置文件需更新至V0.1.7版本。全身遥操模式下,躯干也会跟随您身体的移动而移动,请仔细阅读以下内容并熟悉操作流程后再进行使用。
7.1 密钥配置
请先阅读使用提示后,联系星海图售后团队获取启动全身遥操的密钥, 按照如下流程进行配置。
sudo chown -R nvidia:nvidia /opt/galaxea
mkdir /opt/galaxea/galaxeaKey
cp keys.env /opt/galaxea/galaxeaKey/
7.2 使用流程
7.2.1 启动全身遥操
-
同 4.1 章节类似,登录 R1 Lite
ssh nvidia@${R1_Lite_IP} -
进入软件包启动目录
cd /home/nvidia/galaxea/install/startup_config/share/startup_config/script/ -
启动软件
# 清除已经启动的程序
tmux kill-server
# 启动全身遥操
./robot_startup.sh boot ../sessions.d/ATCStandard/R1LITEVRTeleop_whole_body.d/
注意:启动本体程序后,R1Lite的双臂会运动抬起,请注意前方操作空间安全。
7.2.2 VR设备程序启动
请参考第4.2章节,完成 VR 头显程序的启动,并进行全身遥操作。
注意:由于全身遥操模式下,R1Lite的躯干姿态会跟随VR头显的姿态变化而变化,请确保VR头显已经正常佩戴,并且绑带固定牢靠,如下图所示。 为了安全,请时刻确保头显稳定固定在颈部。 如有任何异常,请长按右控制器B键退出。
为了安全,请时刻确保头显稳定固定在颈部。
如有任何异常,请长按右控制器B键退出。
如在安装和启动过程中有任何问题,请及时与我们联系�至support@galaxea-dynamics.com或致电4008-780-980获得技术支持!