开箱指南(机械臂分装版)
欢迎开启 Galaxea R1 Pro 的智能操控新纪元!星海图 R1 Pro 全新一代仿人形通用机器人将助力您实现具身智能场景落地的无限可能!
当前文档适用于ROS2 SDK V2.1.3及以下版本。如您使用的R1 Pro为ROS2一体版或SDK V2.1.4及以上版本,请点击此处查看对应的开箱操作。
1.开箱前准备
1.1 物品清单检查
收到产品时,请根据以下清单检查包装盒内的物品是否齐全。(部分物品在航空箱内)
| 物品 | 数量 |
|---|---|
| R1 Pro 本体 | 1(台) |
| A2 机械臂 | 2(条) |
| G1 夹爪 | 2(只) |
| 遥控器 | 1(个) |
| 内六角扳手套组 | 1(套) |
| 充电器(10A) | 1(套) |
| 备用线束包 | 1(包) |
您仍需准备以下物品:
| 物品 | 数量 |
|---|---|
| 显示器&键盘&鼠标 | 1(套) |
| PC电脑 | 1(台) |
| WiFi 网络 | - |
| HDMI线 | 1(根) |
您本次收到的R1 Pro机器人为ROS2 Humble系统。二次开发时,您的笔记本电脑系统需安装Ubuntu 22.04版本。设备出厂时,已安装ROS2最新版本的软件SDK,详情可前往查看软件版本更新日志。
2. 开箱
2.1 打开箱锁
找到箱子左侧的两个锁,打开锁片并逆时针旋转。打开箱门,将木板放下放平到地面上。

2.2 拆除箱内固定件
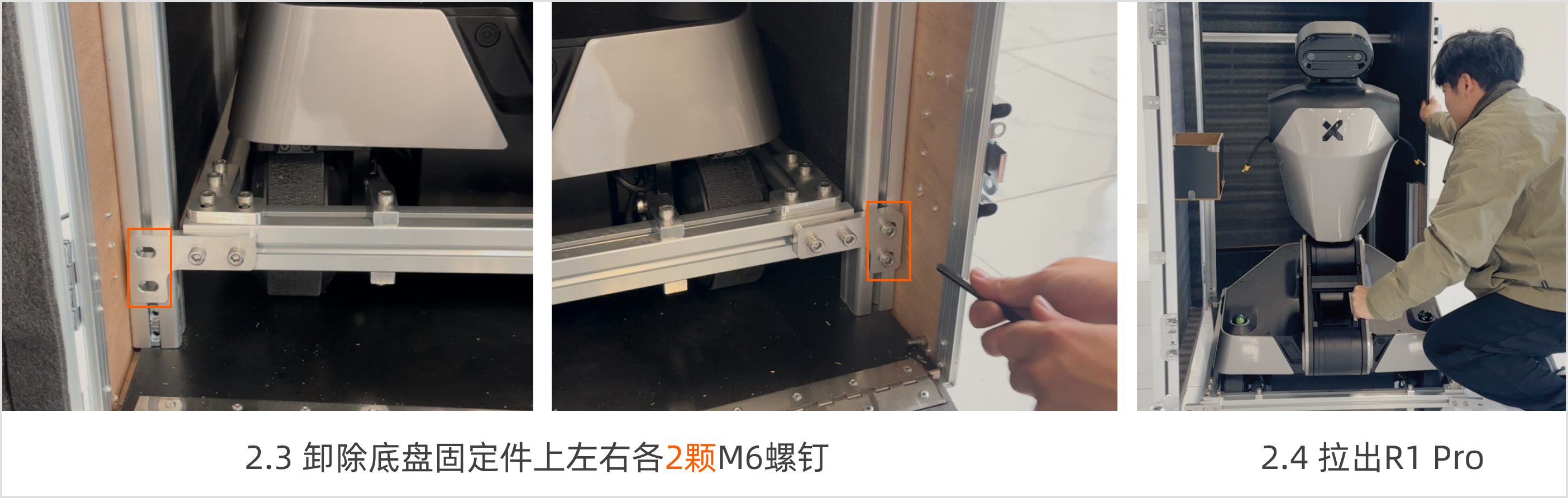
使用M8扳手卸除底盘固定件上左右各 2 颗 M8 螺钉,然后,将机器人从箱子里拉出来,请小心避免碰撞。
2.3 拆除底盘及舵轮固定件
使用M6扳手卸除底盘周围的螺钉,拆除所有型材固定件。然后,按照以下步骤拆除三个舵轮的固定件:
- 将装有固定件的舵轮旋转到两侧,即可露出固定螺钉。
- 使用 M6 扳手卸下三个舵轮的 6 颗固定螺钉。
- 将舵轮转回原位。
注意:为确保产品正常运行,请将机器人放置在干燥、通风良好的环境中,并确保周围没有障碍物或危险物品。
3. 开机
3.1 连接HDMI和USB
注意:安全起见,在连接任何线束前,请勿接入电源。
-
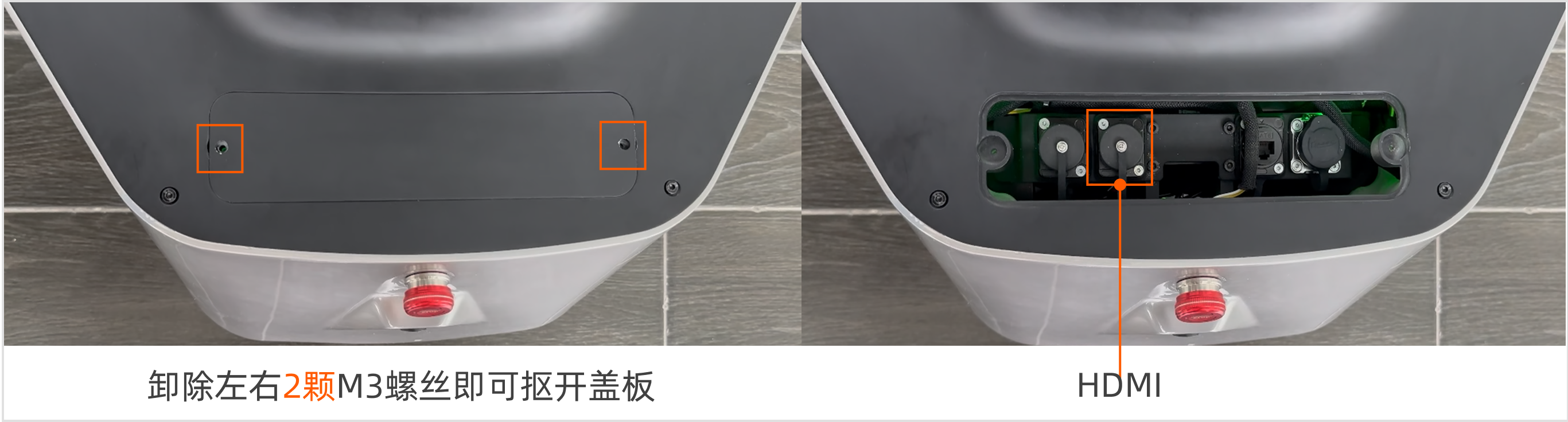
使用 M2 扳手卸下底盘外设接口盖上的 2 颗螺钉,即可抠开盖板。将显示器的 HDMI 线至底盘外设接口,请确保连接牢固,避免松动。
-
将鼠标、键盘的 USB 线连接至后颈部的外设接口,请确保连接牢固,避免松动。

3.2 打开电源
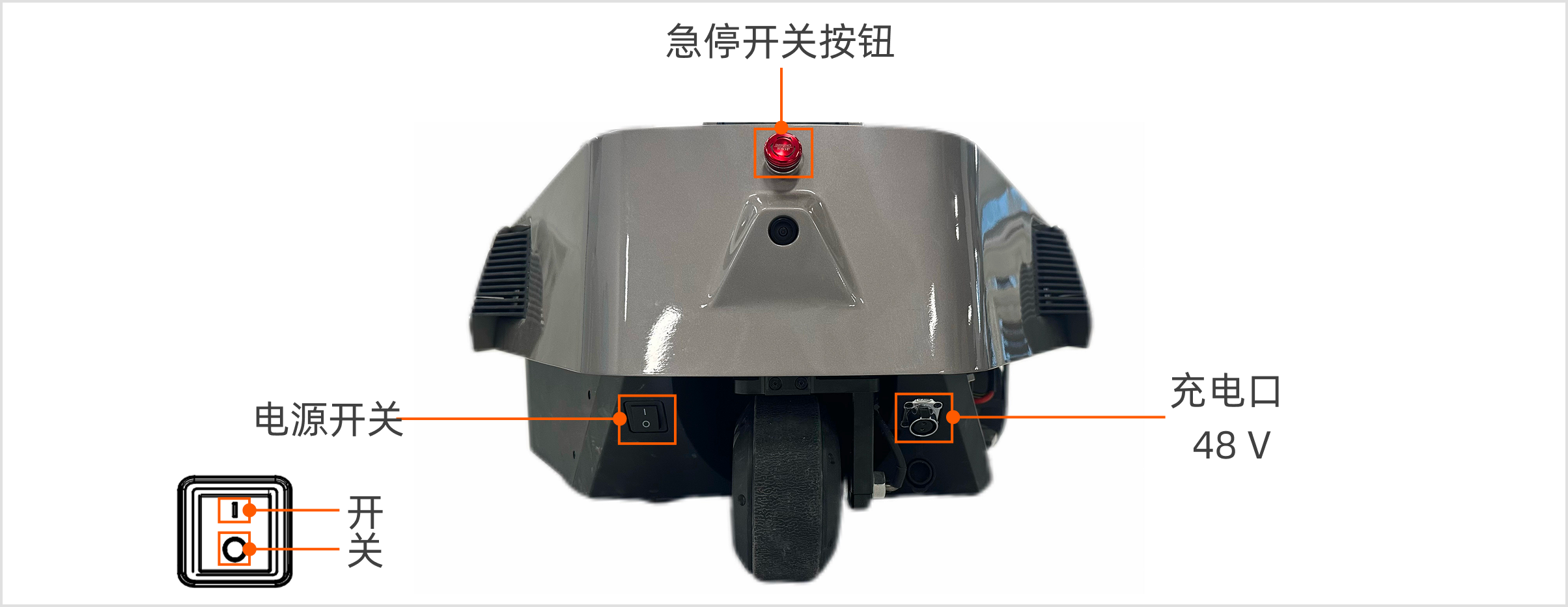
开机请先打开底盘尾部下方的船形按钮(硬开关),开启供电。然后,向下长按后腰处的圆形开关机键(软开关)至少 3s,直到提示音响起且指示灯亮起。
关机可以通过长按开机键 5s 后松开,或关闭底盘硬开关直接切断电源。
注意:开机前,请检查并保持紧急停止按钮呈抬起释放状态。如在开机且运行状态下,急停按钮被按下,此时须关闭硬开关,然后再打开;否则,机器人无法正常工作。关机前,请扶好机械臂,或移动机器人至无障碍区域,以防止由于断电而导致的机械臂突然掉落。
3.2.1 充电
电池充电口位于底盘后侧底部。如需充电,请先拧开充电口盖,将电源线接入。当充电器上的红灯亮起时,且底盘两侧的电源呼吸灯呈绿色频闪状态,表示机器人正在充电。
如果机器人的底盘内有电池但电量耗尽,应先充电然后再开机。
3.2.2 更换电池
电池位于底盘右侧底部。更换电池须先拆除底盘侧边盖板的2颗螺钉,并向右滑动盖板拆卸;然后,将电池塞进底盘内部,并连接供电线束;最后,关闭盖板。 注意:对于海外用户,由于运输限制,机器人和电池将分开发货,请先安装电池后再开机。

4. 连接机器人
注意:机器人出厂时,已安装最新版软件SDK。安装目录为:~/galaxea
4.1 获取IP地址
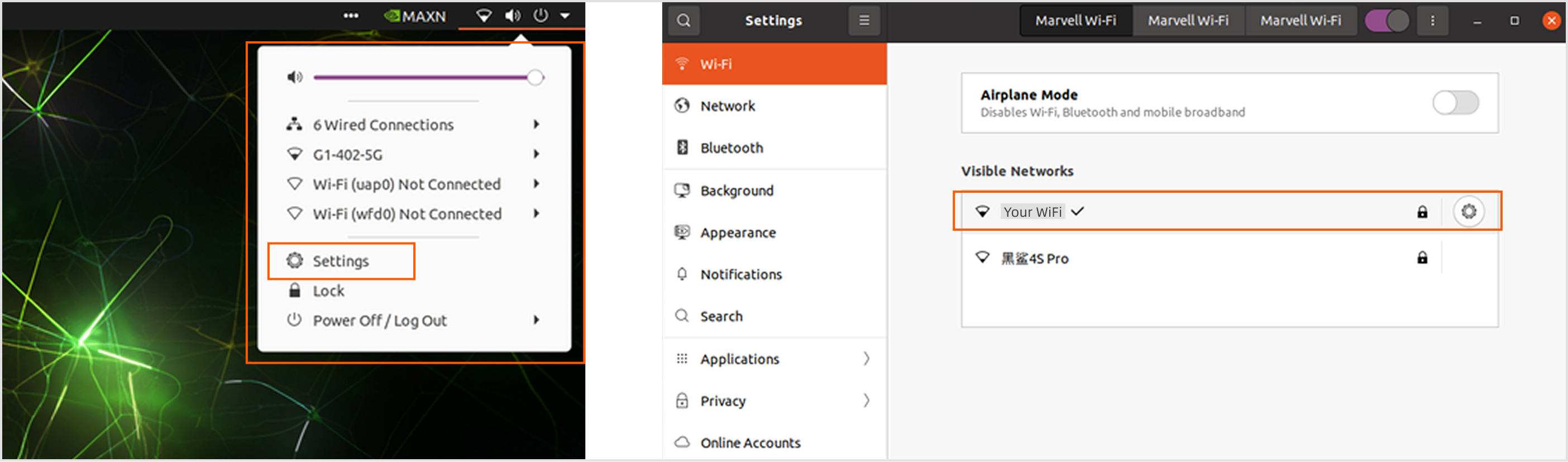
请先将显示器的 HDMI 线至底盘外设接口,并连接键盘和鼠标的 USB 线至机器人后颈部的外设接口。然后,开机并等待显示器显示桌面。接下来,请按照以下步骤进行操作:
-
点击“设置”并连接WiFi。
-
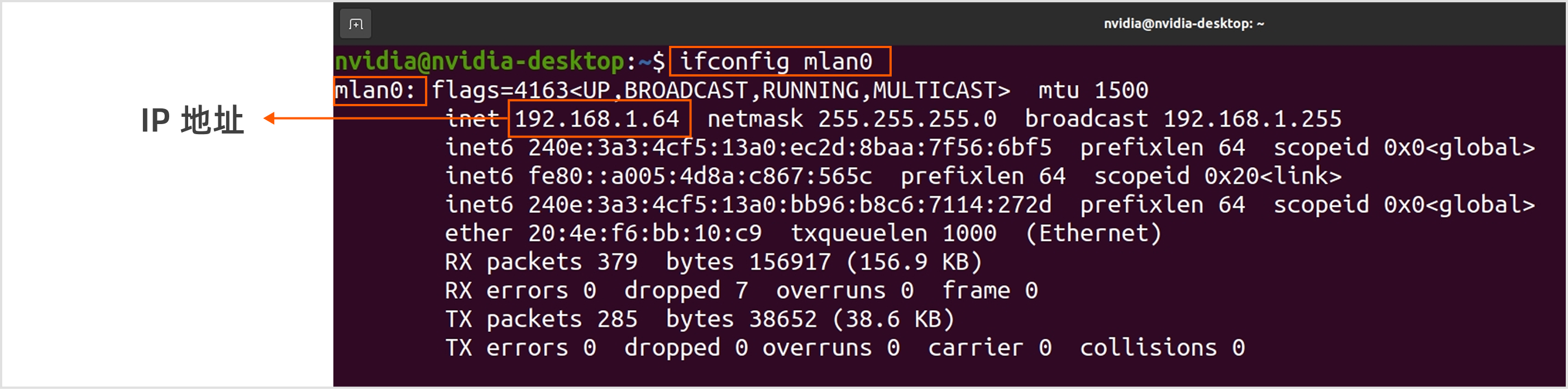
按
Ctrl + Alt + T打开终端,并输入以下命令:ifconfig wlan0 -
查看
wlan0信息,即可获取机器人Orin的IP地址:192.xxx.xxx
4.2 远程SSH连接
使用可打开终端的Ubuntu 22.04系统笔记本电脑,输入以下命令,连接机器人Orin。
ssh nvidia@IP address
# 密码(默认):nvidia
如果连接成功,请断开HDMI和USB连接线,并关闭底盘和胸腔的外设接口盖,以免影响活动范围。如果连接失败,请及时联系我们support@galaxea-dynamics.com提供技术支持。
4.3 启动CAN驱动程序
每次重启R1 Pro时,都必须执行本节操作启动CAN驱动程序。
在控制R1 Pro的整个过程中,需要打开多个终端。建议使用TMUX,常用指令如下:
- 创建新终端:按
Ctrl + B然后按C。 - 切换终端:按
Ctrl + B然后按数字,数字表示终端窗口的序号。
请按照以下步骤启动CAN驱动程序:
-
启动TMUX。
tmux -
输入以下命令,启动FDCAN通信。
bash ~/can.sh
# 可能需要再次输入密码:nvidia
# 若出现“RTNETLINK answers: Device or resource busy”这个错误信息,通常表示你尝试配置的设备(如网络接口或CAN收发器)已经被配置并且正在运行中。若上述命令使用无效,也可以使用运行以下命令:
sudo ip link set can0 type can bitrate 1000000 sample-point 0.875 dbitrate 5000000 fd on dsample-point 0.85
sudo ip link set up can0 -
按下
Ctrl + B加C创建新终端,启动机器人控制节点。source {your_download_path}/install/setup.bash
cd {your_download_path}/install/startup_config/share/startup_config/script
./robot_startup.sh boot ../sessions.d/ATCStandard/R1PROBody.d/
4.4 第一次自检
注意:在对R1 Pro进行任何操作之前,请务必完成自检,以确保安全。
请确保:
- 机器人已出箱且所有固定件已拆除;
- 躯干保持折叠状态,且机械臂未安装。
按照以下步骤进行第一次自检。
cd ~/galaxea/install
source setup.bash
ros2 run rds_ros rds_ros_node
根据提示按下Enter回车键,通过后即可开始自检。
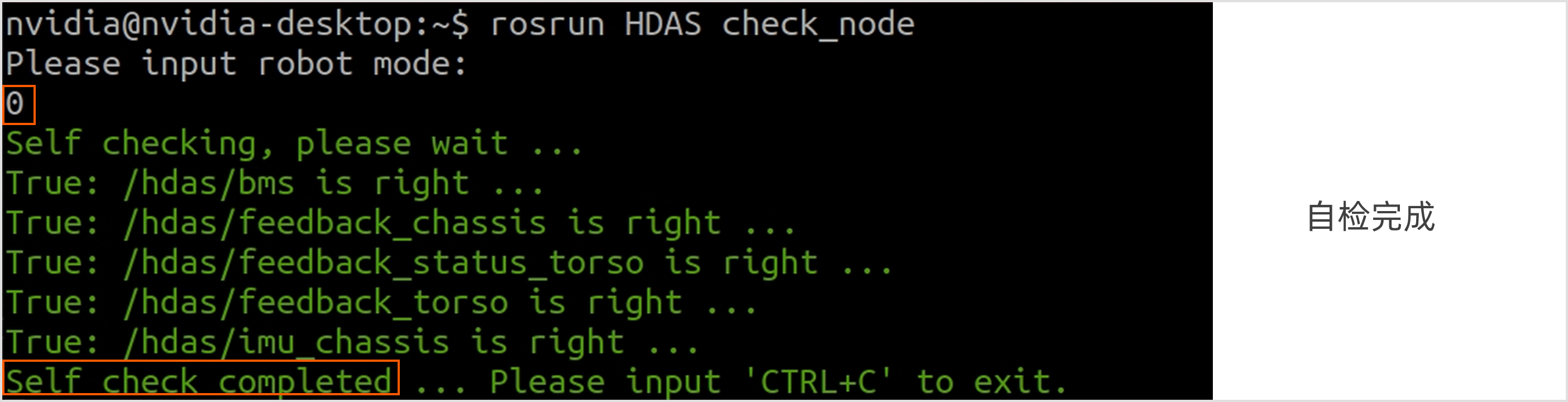
此时,自检会检查当前产品所拥有的全部外设状态。在开箱时,无须关注除躯干、底盘及手臂之外的所有报错。(由于暂未启动任何相机,所以此时可忽略与camera相关的报错)
等待自检进行完成后,请输入 1,开始进行开箱折叠状态(folding state)时,躯干下蹲且未安装双臂的自检。
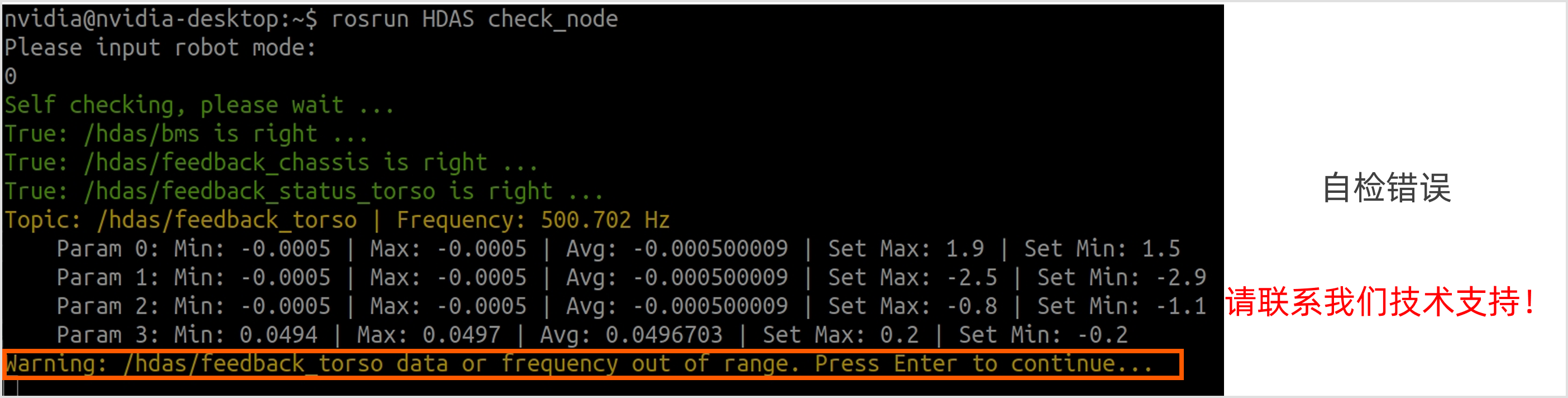
如果出现其他特殊警告或报错,请及时联系我们提供技术支持!
4.5 上位机控制躯干站立
注意:请确保机器人已出箱且没有任何干扰或固定件。否则,躯干会进入自锁保护状态。
按下 Ctrl + B 加 C 创建新终端,启动上位机控制。
source ~/galaxea/install/setup.bash
cd ~/galaxea/install/mobiman/share/mobiman/scripts
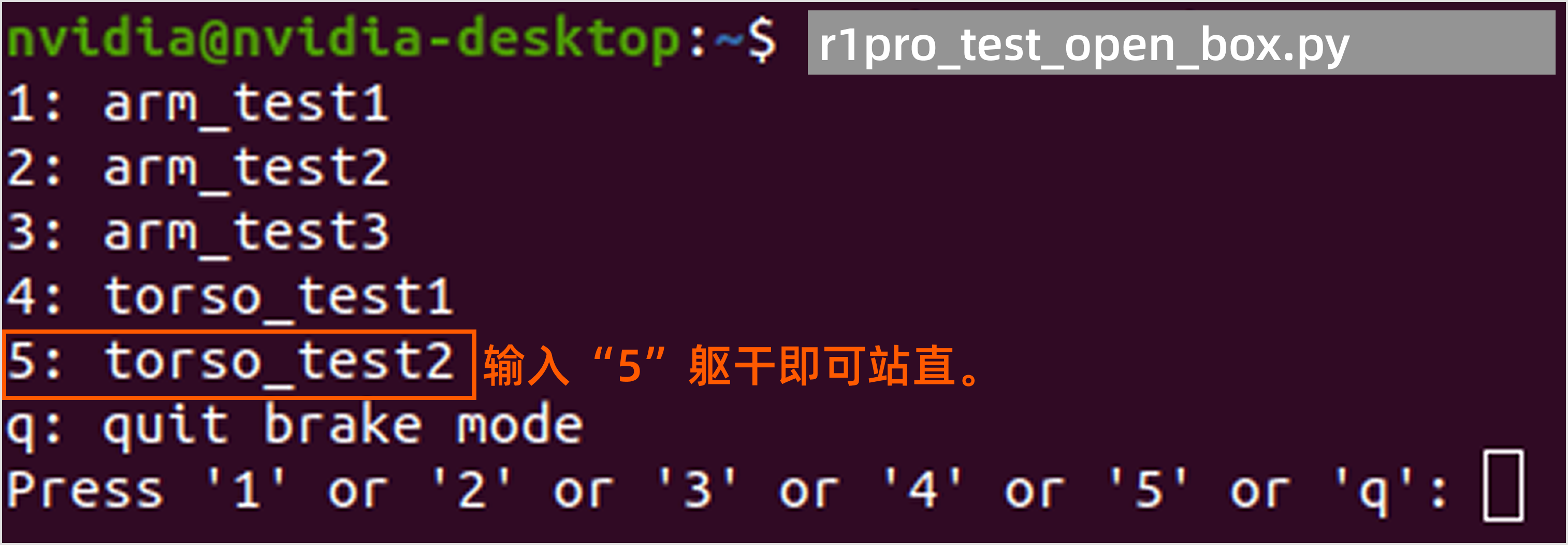
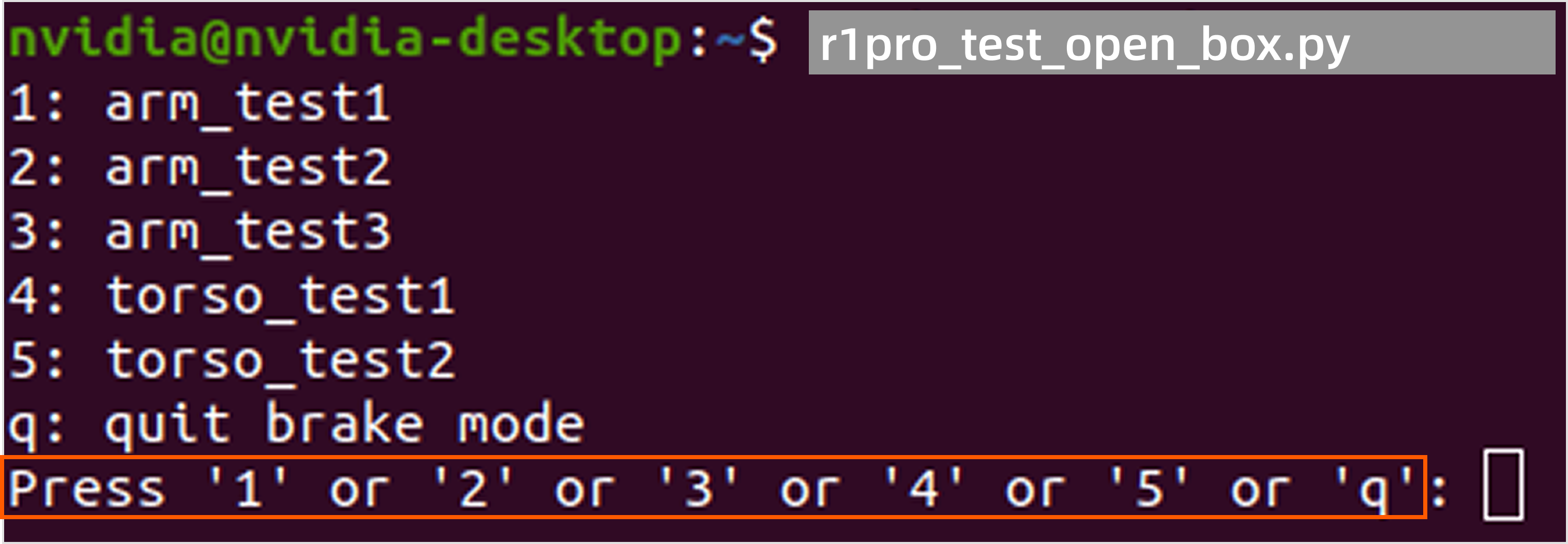
python3 r1pro_test_open_box.py
请输入 0 :(表示未安装机械臂)

请输入 5:(使躯干站立)
5. 安装手臂
注意:请先将机器人断电,再开始安装机械臂。
5.1 拆卸后胸腔壳
打开后颈部的外设接口盖,使用M4扳手卸除盖板下的2颗螺钉,再使用M5扳手卸除胸腔左右两侧的各2颗螺钉,拆下后盖。

5.2 拆卸前侧盖板
使用L型六角扳手(M5)卸除胸腔两侧的六个M5螺钉,如下图所示。

5.3 安装手臂
注意:在安装机械臂时,必须确保机械臂底座上的端口朝向后方。机械臂底座贴有标签,注意区分左右臂。
打开机械臂产品箱,拿出机械臂并安装在机器人两侧。使用 M6 扳手安装 4 颗螺钉,即可固定手臂。
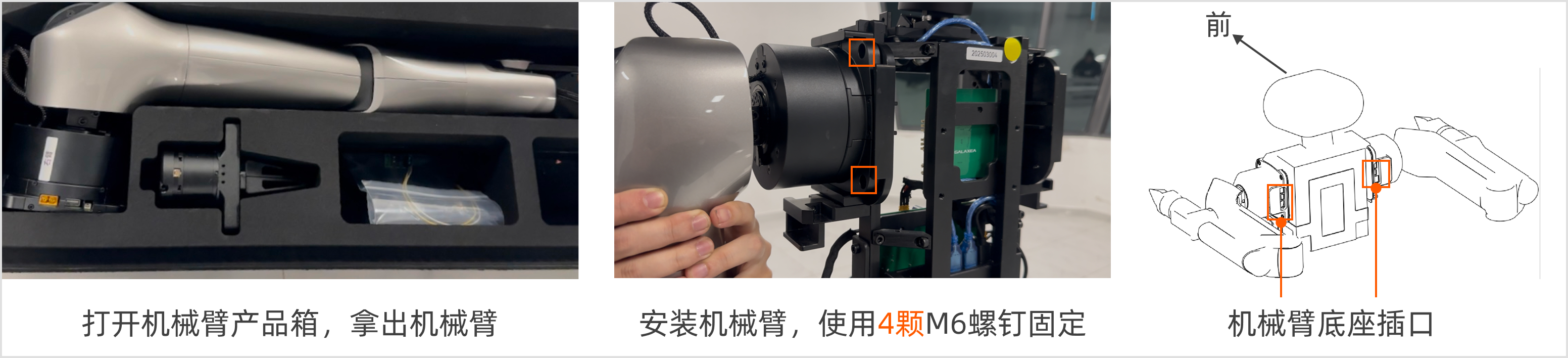
将机械臂电源线和 CAN 线连接到底座端口。在插入 CAN 线前,请先卸下电阻帽。
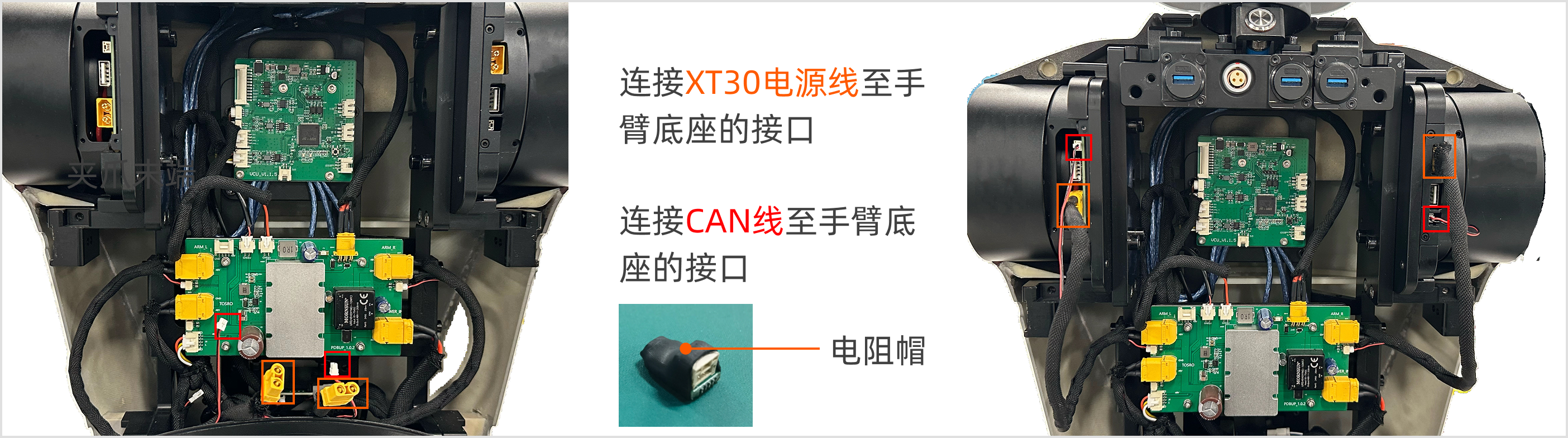
注意:建议您妥善保存电阻帽,请勿丢失。当机器人在未安装机械臂的状态下使用时,需要重新安装电阻帽。
通信连接成功后,反向执行上述第 5.1 节和第 5.2 节的步骤,重新装上外壳。
5.4 安装夹爪
注意:安全起见,安装夹爪前,请先关闭电源。安装后,将机械臂摆放至初始位姿。
- 对齐检查:确保夹爪周围的 3 个安装孔与机械臂末端的 3 个安装孔对齐。
- 连接末端:对齐后,使用 M3 扳手将 3 颗螺钉,固定夹爪至机械臂末端法兰;请仔细检查是否安装牢固。
- 连接线束:连接机械臂末端关节 J6 外侧的 CAN 线束至夹爪的通信口。

6. 第二次自检
安全起见,自检前请确保:
- 机器人已关闭电源;
- 躯干已站立,且机械臂已正确安装;
- 机械臂姿保持自然下垂,即肘关节连接处(黑色橡胶朝正前方)且夹爪垂直朝下指向地面(夹爪电缆朝外)。

-
将机器人开机,按照第4.3节-启动CAN驱动程序中的命令重复操作一遍。
-
按
Ctrl + B然后按C创建新终端,启动机器人节点。source ~/galaxea/install/setup.bash
cd ~/galaxea/install/startup_config/share/startup_config/script
./robot_startup.sh boot ../sessions.d/ATCStandard/R1PROBody.d/ -
按
Ctrl + B然后按C创建新终端,进入到 install 目录下,开始第二次自检。cd ~/galaxea/install
source setup.bash
ros2 run rds_ros rds_ros_node根��据提示按下 Enter 回车键,通过后即可开始自检。
注意:此时,自检会检查当前产品所拥有的全部外设状态。在开箱时,无须关注除躯干、底盘及手臂之外的所有报错(由于暂未启动任何相机,所以此时可忽略与 camera 相关的报错)。
-
等待自检进行完成后,请输入2,开始进行直立状态(upright state)下,躯干直立且安装双臂的自检。
-
自检成功,即可按 3 退出。
7. Demo演示
安全起见,在进行 Demo 展示前:
- 建议将机器人移动至开阔区域,确保周围没有障碍物;
- 必须完成自检。
-
按
Ctrl + B然后按C创建一个新终端,执行Demo脚本。source ~/galaxea/install/setup.bash
cd ~/galaxea/install/mobiman/share/mobiman/scripts
python3 r1pro_test_open_box.py -
请输入 1 :(表示已安装机械臂)
-
按顺序依次输入数字 1~5,并按 Enter回车键,机器人将开始执行Demo的分段动作。
-
当完成所有动作后,按
q退出,机器人将回到初始姿态。
在后续使用机器人的过程中,请参考R1 Pro Demo演示指南进行后续完整操作.