开箱指南
1. 物品清单检查
打开包装盒后,请按照发货清单仔细检查以下物品是否齐全:

| 物品 | 数量 | 备注 |
|---|---|---|
| 机械臂 | 1 | 机械臂本体 |
| 电源适配器 | 1 | 额定电压:24V |
| 开关电路 | 1 | 用于开启和关闭机械臂电��源。 |
| CAN盒 | 1 | 用于机械臂通信。 |
| CAN线 | 1 | 用于连接CAN盒和机械臂。 |
| USB-CAN线 | 1 | 用于连接CAN盒和电脑。 |
| G夹 | 2 | G型紧固件,用于将桌面固在桌面上。 |
| G夹转接板 | 1 | 用于放置机械臂,通过G夹固定其至桌面。 |
| 内六角L型扳手套件 | 1 | 用于固定螺钉。 |
| M6螺钉小包 | 1 | 用于固定机械臂底座至G夹转接板�上。 |
注意:A1XY机械臂标配不包括夹爪。如有需要,请联系我们购买。
此外,仍需准备以下物品:
| 物品 | 数量 | 备注 |
|---|---|---|
| 上位机 | 1 | 操作系统:Ubuntu 22.04 LTS 中间件依赖:ROS 2 Humble |
注意:为确保产品正常运行,请将A1XY放置在干燥、通风良好的环境中,并确保周围没有障碍物或危险物品。
2. 安装本体
- 请选择合适的安装平台,确保平台平整、稳固,能够承受机械臂在运行过程中的最大负载。
- 请清洁安装平台表面,去除杂物、灰尘等可能影响安装稳定性的物质,保证安装底座板与平台之间的紧密贴合。
按照以下步骤安装固定机械臂:
- 将G夹转接板放置在选定的安装平台或桌面上,确保其位置合适,便于后续的固定操作。
- 使用G夹固定好转接板。
- 将机械臂小心地放置在转接板中央,确保机械臂底座四周的孔位与G夹转接板的孔位准确对接,使用M6螺丝固定机械臂。
3. 连接线束
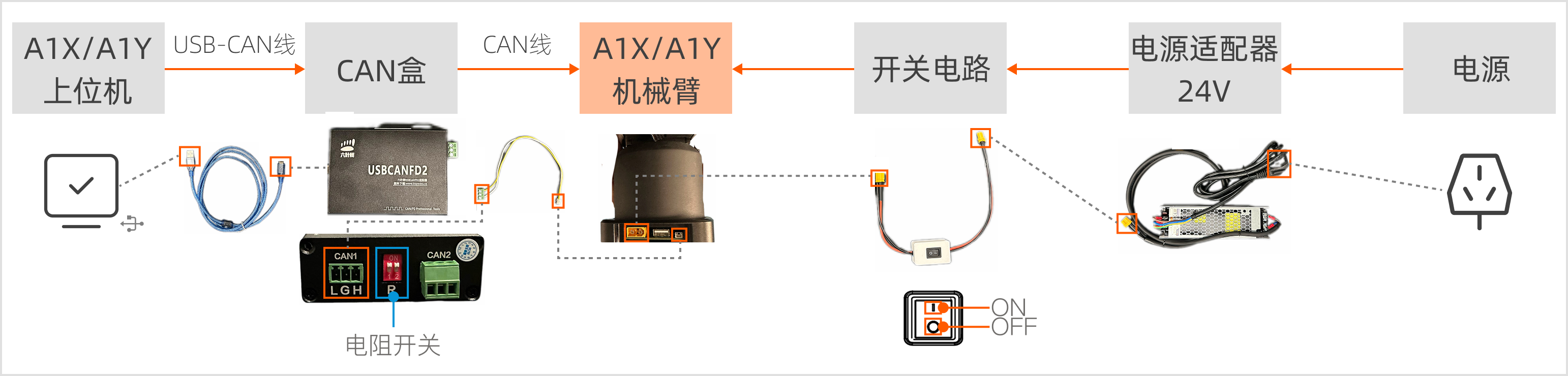
- 连接USB-CAN线至上位机和CAN盒。
- 连接线束包中的CAN线两端至机械臂底座的CAN线接口和CAN盒的CAN1接口,并将CAN盒的电阻开关R1、R2均拨至顶部。
- 连接开关电路的两端至机械臂底座的供电口和电源适配器。
- 将电源适配器接入电源中。
4. 启动前准备
4.1 硬件准备
| 物品 | 数量 | 备注 |
|---|---|---|
| A1XY 机械臂 | 1 | 机械臂本体 |
| 上位机 | 1 | 操作系统:Ubuntu 22.04 LTS 中间件依赖:ROS 2 Humble |
注意:请确保已按照A1XY开箱安装指南完成机械臂的本体安装及线束连接后,方可按照以下内容启动机械臂控制
4.2 软件准备
4.2.2 安装SDK
注意:SDK文件仅支持X86架构。
-
执行以下命令检查通信连接状态。
ifconfig can0
-
执行以下命令安装SDK:
tar -xf ${your_download_path}/A1_XY.tar.gz -C ~/
5. 启动SDK
5.1 启动CAN驱动程序
在控制A1XY的整个过程中,您需要打开多个终端。我们建议您使用TMUX。常用指令如下:
- 创建新终端:按
Ctrl + B然后按C。 - 切换终端:按
Ctrl + B然后按数字,数字表示终端窗口的序号。
现在,您可以按照以下步骤启动CAN驱动程序。
-
启动TMUX。
tmux -
启动FDCAN通信。
./can.bash
# 或执行以下操作
sudo ip link set can0 type can bitrate 1000000 sample-point 0.875 dbitrate 5000000 fd on dsample-point 0.875
sudo ip link set up can0 -
按
Ctrl + B然后按C创建新终端。然后启动HDAS。source {your_download_path}/install/setup.bash
ros2 launch HDAS a1xy.launch
5.2 启动控制
-
运行以下命令以转储 CAN 总线消息。
candump can0
-
按
Ctrl + B然后按C创建新终端。运行以下命令以启用硬件接口和ROS接口。source {your_download_path}/install/setup.bash
# 根据产品型号,选择以下启动方式之一:
ros2 launch mobiman A1x_jointTrackerdemo_launch.py
ros2 launch mobiman A1y_jointTrackerdemo_launch.py